This is HPIPM, a high-performance interior-point method solver for dense, optimal control- and tree-structured convex quadratic programs (QP) and quadratically-constrained quadratic programs (QCQP). It provides efficient implementations of dense and structure-exploiting algorithms to solve small to medium scale problems arising in model predictive control and embedded optimization in general and it relies on the high-performance linear algebra package BLASFEO.
HPIPM (and BLASFEO, which is a dependency), comes with both make and cmake build systems.
The preferred one is make, which can be used to compile and run any library, interface and example in any language.
make is also used in the continuous integration travis scripts.
cmake can only be used to compile the libraries, while the interested user should compile interfaces and run examples by him/herself by taking inspiration form the commands in the various Makefiles.
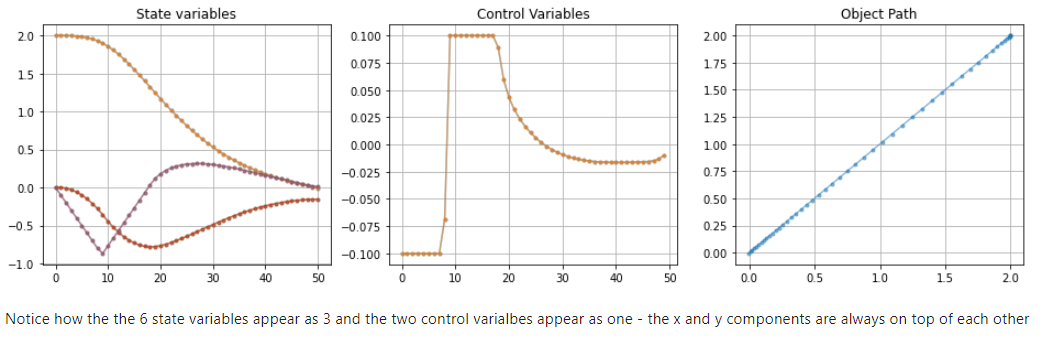
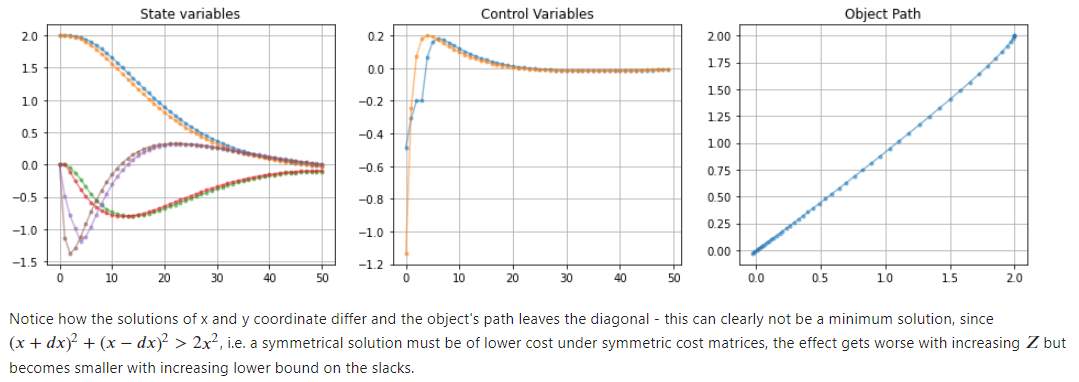
The best way to get started with HPIPM is to check out the examples in /hpipm/examples/.
HPIPM can be directly used from C, but there are also interfaces to Python and Matlab.
Depending on which level you want to use HPIPM, check out the following section below.
The QP notation used in HPIPM can be found in the doc folder.
In order to run the C examples in /hpipm/examples/C/ follow the steps below:
- Clone BLASFEO on your machine:
git clone https://github.com/giaf/blasfeo.git - From the BLASFEO root folder, run
make static_library -j 4 && sudo make install_static(default installation folder:/opt/blasfeo; if a different one is chosen,BLASFEO_PATHin HPIPM'sMakefile.ruleshould be updated accordingly) - From the HPIPM root folder, run
make static_library -j 4 && make examples - In a terminal, navigate to
/hpipm/examples/c/and rungetting_started.outto solve a simple OCP-structured QP.
The interface for Matlab and Octave is based on mex files.
- Clone BLASFEO on your machine:
git clone https://github.com/giaf/blasfeo.git - From the BLASFEO root folder, run
make shared_library -j 4 && sudo make install_shared - From the HPIPM root folder, run
make shared_library -j 4 && sudo make install_shared - In a terminal, navigate to the folder
hpipm/interfaces/matlab_octave. Set the needed environment flags by runningsource env.sh(you may need to change theBLASFEO_MAIN_FOLDER, or to make it equal to theBLASFEO_PATH) in that folder. Compile the interface by runningmake all -j 4(for Octave), ormake compile_mex_with_matlab(for Matlab). - In a terminal, navigate to the folder
hpipm/examples/matlab_octave. Set the needed environment flags by runningsource env.sh(you may need to change theBLASFEO_MAIN_FOLDER, or to make it equal to theBLASFEO_PATH) in that folder. Run an instance of Matlab or Octave from the same terminal. Get started by running the examples in that folder.
The interface for Matlab and Octave is based on mex files.
- Clone BLASFEO on your machine:
git clone https://github.com/giaf/blasfeo.git - Install Microsoft Visual C++
- From the BLASFEO root folder, run
mkdir build
cd build
cmake ..
cmake --build .
Copy blasfeo.lib from build/Debug/ to lib/.
- From the HPIPM root folder, run
mkdir build
cd build
cmake ..
cmake --build .
(you may need to change the BLASFEO_PATH to the actual value matching your BLASFEO installation, e.g. by replacing the second last line above with cmake -DBLASFEO_PATH=/path/to/your/blasfeo/installation/folder ..).
Copy hpipm.lib from build/Debug/ to lib/.
- Open Matlab and navigate to the folder
hpipm/interfaces/matlab_octave. Set the needed environment flags by runningenv.m(you may need to change theBLASFEO_MAIN_FOLDER, or to make it equal to theBLASFEO_PATH) in that folder. Compile the interface by runningcompile_mex_all.m.
(Make sure that Matlab is configured to compile mex files with the same compiler as used in point 2), as sometimes by default it makes use of MinGW64 instead. If the HPIPM and BLASFEO libraries and the mex files are not all compiled with visual studio, or all compiled with MinGW64, errors about missing dependencies from the runtime library happen.)
- In Matlab, navigate to the folder
hpipm/examples/matlab_octave. Get started by running the examples in that folder. You may need to add folderhpipm/interfaces/matlab_octaveto the Matlab path.
The QP model is read from the file qp_data.c, which can be generated using the C, matlab/octave or python interfaces.
- Follow the steps 1)-4) for the MATLAB interface.
- In a terminal, navigate to the folder
hpipm/examples/simulink. Runmake_sfun.mto compile the S-function, andload_paramaters.mto load some parameters used in the simulink model (e.g. horizon length, number of inputs and states) formqp_data.c. - Open the simulink model
hpipm_simulink_getting_started.slxand start the simulation.
If you would like to try out the Python interface, check out the examples in /hpipm/examples/python/ after going through the following steps:
- Clone BLASFEO on your machine:
git clone https://github.com/giaf/blasfeo.git - From the BLASFEO root folder, run
make shared_library -j 4 && sudo make install_shared - From the HPIPM root folder, run
make shared_library -j 4 && sudo make install_shared - In a terminal, navigate to
/hpipm/interfaces/python/hpipm_pythonand runpip install .orpip3 install .(depending on your python version). - In a terminal, navigate to
/hpipm/examples/python. Set the needed environment flags by runningsource env.sh(you may need to change theBLASFEO_MAIN_FOLDER, or to make it equal to theBLASFEO_PATH) in that folder. Alternatively you can make sure yourself that the location of the installed shared libraries is known to the system e.g. by runningexport LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/blasfeo/lib:/opt/hpipm/lib(possibly after updating it to the chosen installation directories). Finally, runpython example_qp_getting_started.pyorpython3 example_qp_getting_started.py(depending on your python version) to solve a simple OCP-structured QP.
For performance reasons, HPIPM uses an internal matrix (and vector) format based on BLASFEO own matrix (and vector) structs. The exact layout of the matrix elements in memory is implementation- and architecture-dependent, so it can't be just inspected directly.
However, in the C interface there are setter and getter routines to correctly populate these internal matrix (and vector) representations.
By default these setter and getter routines expect matrices to be passed in column-major order, that is the default order in e.g. Matlab and optimized linear algebra libraries such as BLAS and LAPACK.
There is also a versions of a few setter and getter routines that expect matrices to be passed in row-major order, and these routines are clearly marked using the wording _rowmaj at the end of the routine name.
These routines are basically identical to the default (aka column-major) ones with the only difference that the input matrix is transposed while being packed in / unpacked from the internal format.
Notice that the memory layout of the elements in the column-major matrix order corresponds to the layout of the transposed of the same matrix in the row-major matrix order, and the other way around.
Also notice that in C a matrix represented as an array of arrays is stored in row-major order. Similarly, in Python a matrix represented using numpy as an array of arrays is also stored in row-major order. On the other hand, in Matlab a dense matrix is stored in column-major order. This can be source of confusion.
-
G. Frison, M. Diehl. HPIPM: a high-performance quadratic programming framework for model predictive control. (2020) (arXiv preprint https://arxiv.org/abs/2003.02547)
-
G. Frison, J. Frey, F. Messerer, A. Zanelli, M. Diehl. Introducing the quadratically-constrained quadratic programming framework in HPIPM. (2022) (arXiv preprint https://arxiv.org/abs/2112.11872)
-
G. Frison, H.H. B. Sørensen, B. Dammann, and J.B. Jørgensen. High-performance small-scale solvers for linear model predictive control. In IEEE European Control Conference, pages 128–133. IEEE, 2014 - https://ieeexplore.ieee.org/document/6981589/
-
G. Frison, D. Kouzoupis, T. Sartor, A. Zanelli, M. Diehl. BLASFEO: Basic Linear Algebra Subroutines For Embedded Optimization. ACM Transactions on Mathematical Software (TOMS) (2018) (arXiv preprint https://arxiv.org/abs/1704.02457)
- HPIPM relies on the high-performance linear algebra library BLASFEO.
BLASFEO provides several implementations optimized for different computer architectures, and it makes heavy use of assembly code.
If you get the error
Illegal instructionat run time, you are probably using a BLASFEO version (TARGET) unsupported by your CPU.