Simulattion of the Realsense R200 sensor in Gazebo.
Build the plugin
catkin build realsense_gazebo_pluginTest it by running
roslaunch realsense_gazebo_plugin realsense.launchAfter building the plugin, you can run the unittests
rostest realsense_gazebo_plugin realsense_streams.testUsing depth_image_proc package, we can generate a point cloud from the depth image by running
roslaunch realsense_gazebo_plugin realsense.launch # in terminal 1
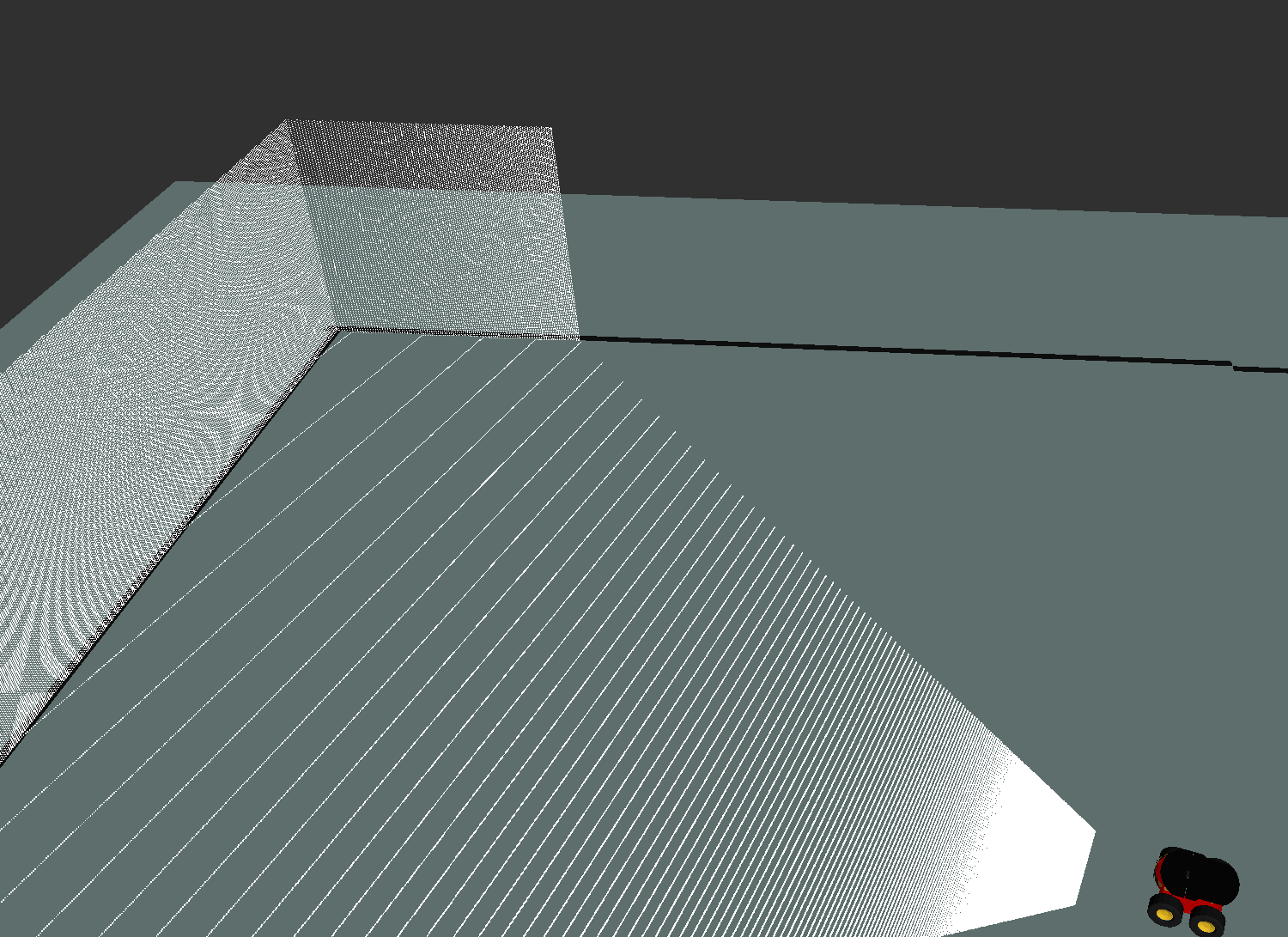
roslaunch realsense_gazebo_plugin depth_proc.launch # in terminal 2Then open Rviz, and display the /realsense/camera/depth_registered/points topic, you should see something like this

roslaunch realsense_gazebo_plugin realsense_urdf.launchThis will behave the same as realsense.launch mentioned above, with the difference that it spawns the model from a URDF (see urdf folder).
You can reuse this to plug the sensor in the robot of your choice.
This requires Gazebo 6 or higher and catkin tools for building.
The package has been tested on ROS melodic on Ubuntu 18.04 with Gazebo 9.
This is continuation of work done by guiccbr for Intel Corporation.
Thanks to Danfoa for contributing the URDF integration.