
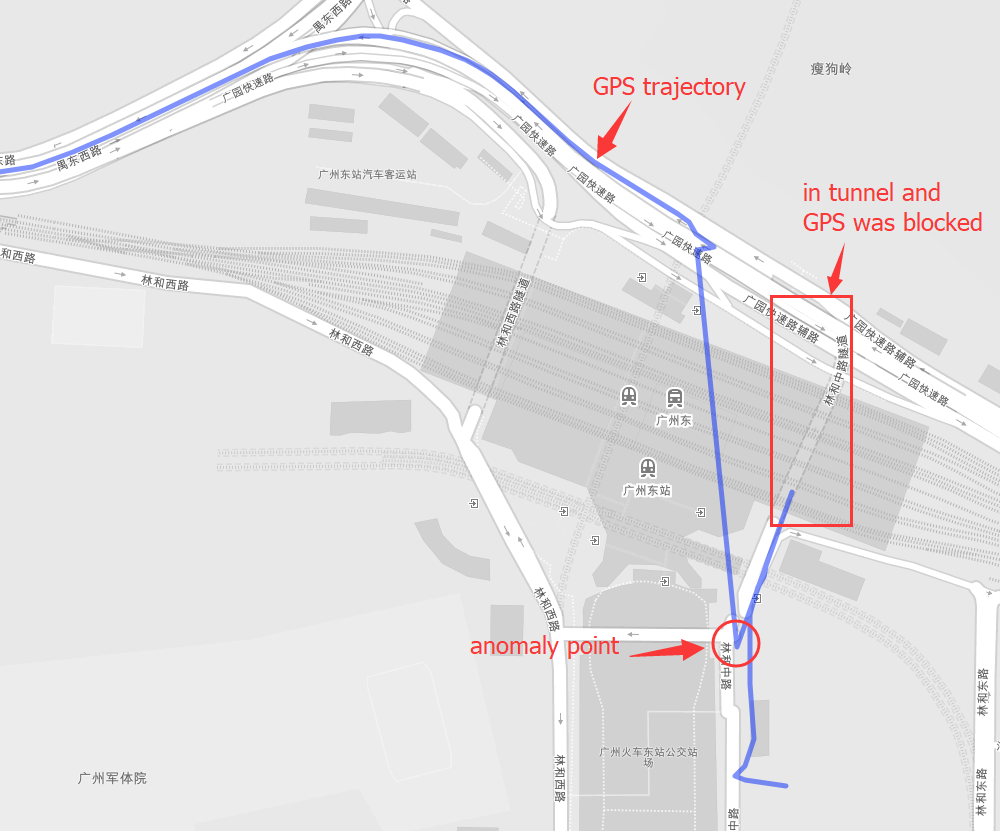
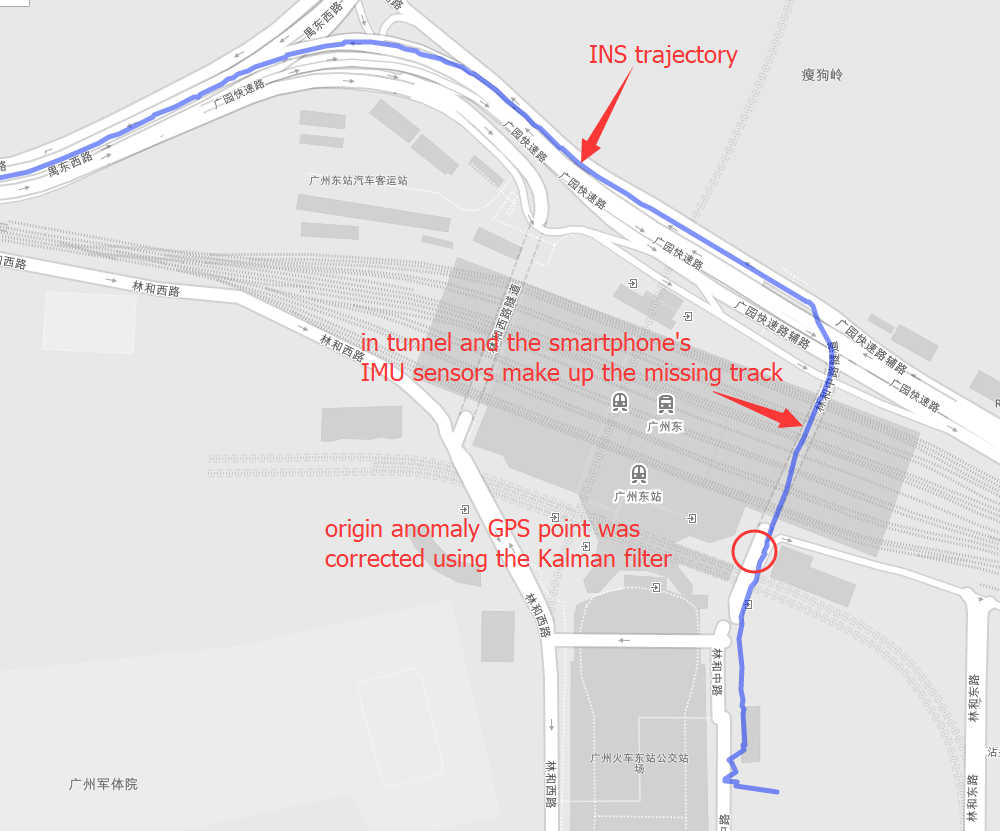
Positioning is the most basic and crucial step in the driving navigation. An accurate positioning can effectively improve the accuracy of the road-binding, and can also sense the change of the driving pattern more accurately. Since the project is mainly based on mobile phones for navigation and positioning, Currently used is the built-in sensor data (gyroscope, accelerometer, geomagnetic meter, direction sensor, gravity sensor) and GPS data fusion positioning.
- gyroscope(x, y, z).
- accelerometer(x, y, z).
- geomagnetic meter(x, y, z).
- gravity sensor(x, y, z).
- direction sensor(roll, pitch, yaw).
- compass(degree).
- road info(distance to next cross, bearing, road type).
- GPS(lng, lat, alt, accuracy, speed, bearing, t).
- sensor data filter.
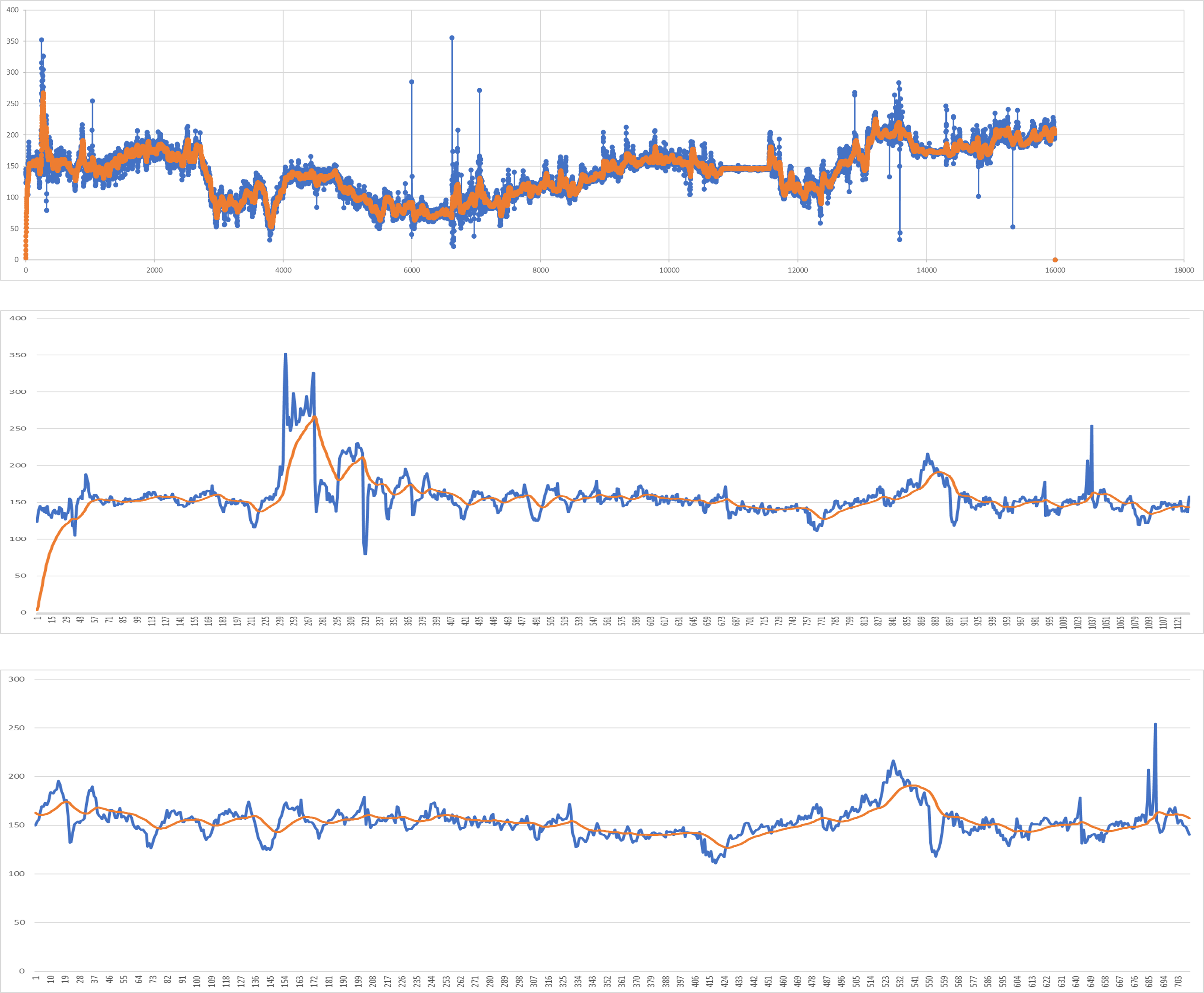
- GPS fusion INS under uncoupling system.
First make sure gcc and cmake was installed, and include this library into your project.
git clone https://github.com/yyccR/Location.git
Second open your CMakeLists.txt and add these:
include_directories(${PROJECT_SOURCE_DIR}/Location/include/eigen3)
include_directories(${PROJECT_SOURCE_DIR}/Location/math)
add_subdirectory(Location/math)
include_directories(${PROJECT_SOURCE_DIR}/Location/models)
add_subdirectory(Location/models)
include_directories(${PROJECT_SOURCE_DIR}/Location/location)
add_subdirectory(Location/location)
include_directories(${PROJECT_SOURCE_DIR}/Location/sensor)
add_subdirectory(Location/sensor)
include_directories(${PROJECT_SOURCE_DIR}/Location/system)
add_subdirectory(Location/system)
target_link_libraries(${PROJECT_NAME} Location_math)
target_link_libraries(${PROJECT_NAME} Location_models)
target_link_libraries(${PROJECT_NAME} Location_location)
target_link_libraries(${PROJECT_NAME} Location_sensor)
target_link_libraries(${PROJECT_NAME} Location_system)
target_link_libraries(${PROJECT_NAME} Location_test)
final open your main file, and add the test code.
#include <iomanip>
#include <Eigen/Dense>
#include "sensor/GPS.h"
#include "location/Location.h"
using namespace Eigen;
using namespace std;
int main() {
Location location;
Vector3d gyro_data_v(0.004263,0.019169,-0.001014);
Vector3d mag_data_v(-2.313675,-82.446960,-366.183838);
Vector3d acc_data_v(0.105081,0.108075,9.774973);
VectorXd gps_data_v(7);
gps_data_v << 114.174118,22.283789,0.0,0.0,24.0,0.0,1554348968704.665039;
Vector3d g_data_v(0.094139, 0.107857,9.808955);
Vector3d ornt_data_v(-0.549866,0.629957,-0.069398);
Vector3d road_data(1000.0, 0.0, 0);
location.PredictCurrentPosition(gyro_data_v,acc_data_v,mag_data_v,gps_data_v,g_data_v,ornt_data_v, road_data);
cout << location.GetGNSSINS().lng << " " << location.GetGNSSINS().lat << endl;
return 0;
}
if you see the output 114.174 22.2838 that means this library was embedded to your project successfully.
-
gyroscope(x, y, z), origin gyroscope data, unit rad/s
-
accelerometer(x, y, z), origin accelerometer data, unit m/s²
-
geomagnetic meter(x, y, z), origin geomagnetic data, unit μt
-
gravity sensor(x, y, z), origin gravity data, unit m/s²
-
direction sensor(roll, pitch, yaw), origin sensor data, unit degree
Note that direction sensor doesn't exit actually , the 'sensor data' is computation result from system underlying algorithm.
-
compass(degree), origin sensor data, unit degree
-
road info(distance to next cross, bearing, road type)
This data is from map data, and if you couldn't search map server data, just fill in all zero (0.0, 0.0, 0.0)
- GPS(lng, lat, alt, accuracy, speed, bearing, t)
- lng, longitude, double
- lat, latitude, double
- alt, altitude, double
- accuracy, double
- speed, double
- bearing, double, unit degree
- t, timestampe, unit millisecond
- Api calls details
- Sensor data checking
- Impelement details
- Sensor calibration
- Training Stop detection model
- improve CMake.
- Clean the garbage code.
- Template processing.
- Using smart pointer instead.
- Complete all kinds of documents.
- Add quick start.
- Add more test case.
- Design a suitable pattern.
- 《惯性导航》秦永元
- 《捷联惯性导航技术(第2版 译本)》译者:张天光/王秀萍/王丽霞 作者:DavidH.Titte
- An efficient orientation filter for inertial and inertial/magnetic sensor arrays
- Estimation of IMU and MARG orientation using a gradient descent algorithm
- Direction Cosine Matrix IMU Theory
- METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS
- A Calibration Algorithm for Microelectromechanical Systems Accelerometers in Inertial Navigation Sensors
- A Calibration Method of Three-axis Magnetic Sensor Based on Ellipsoid Fitting
- Accuracy Improvement of Low Cost INS/GPS for Land Applications
- Trajectory preprocessing: Computing with Spatial Trajectories



















































































































