
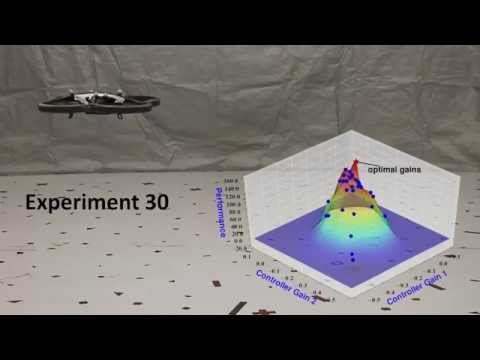
This code implements an adapted version of the safe, Bayesian optimization algorithm, SafeOpt [1], [2]. It also provides a more scalable implementation based on [3] as well as an implementation for the original algorithm in [4]. The code can be used to automatically optimize a performance measures subject to a safety constraint by adapting parameters. The prefered way of citing this code is by referring to [1] or [2].
| [1] | F. Berkenkamp, A. P. Schoellig, A. Krause, Safe Controller Optimization for Quadrotors with Gaussian Processes in Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 491-496. |
| [2] | F. Berkenkamp, A. Krause, A. P. Schoellig, Bayesian Optimization with Safety Constraints: Safe and Automatic Parameter Tuning in Robotics, ArXiv, 2016, arXiv:1602.04450 [cs.RO]. |
| [3] | Rikky R.P.R. Duivenvoorden, Felix Berkenkamp, Nicolas Carion, Andreas Krause, Angela P. Schoellig, Constrained Bayesian optimization with Particle Swarms for Safe Adaptive Controller Tuning, in Proc. of the IFAC (International Federation of Automatic Control) World Congress, 2017. |
| [4] | Y. Sui, A. Gotovos, J. W. Burdick, and A. Krause, Safe exploration for optimization with Gaussian processes in Proc. of the International Conference on Machine Learning (ICML), 2015, pp. 997–1005. |
This package is no longer actively maintained. That bein said, pull requests to add functionality or fix bugs are always welcome.
The easiest way to install the necessary python libraries is by installing pip (e.g. apt-get install python-pip on Ubuntu) and running
pip install safeopt
Alternatively you can clone the repository and install it using
python setup.py install
The easiest way to get familiar with the library is to run the interactive example ipython notebooks!
Make sure that the ipywidgets module is installed. All functions and classes are documented on Read The Docs.
The code is licenced under the MIT license and free to use by anyone without any restrictions.














































































































