This repository prototypes ROS 2.0 for embedded systems using NuttX, Tinq and the STM32F4 IC.
- Milestones
- Hardware
- Setting it up
- Threading
- Running in Linux
- File structure
- DDS Debug Shell
- ROS Client Library (wip)
- Communication
- Limitations
The prototype has been built in a modular way using the following blocks:
......
..... ..... ..... .............
....' ...... ....... ... ....
.... ... ... ...
....
..... ...... ..... .....
..... ...... ....... .....
......
. .....
..... ...... ...... ......
..... .....' ...... ..............
. .
----------------------------------
| application |
----------------------------------
| rcl |
----------------------------------
| DDS (Tinq) |
----------------------------------
| RTOS (NuttX) |
__________________________________
| Hardware (STM32F4) |
----------------------------------
- Quick overview/understand fo the OMG DDS standart
- Evaluate different Open Source DDS implementations and select one meant for embedded devices (Tinq selected)
- Prototype with FreeRTOS (discarded)
- Prototype with Riot (discarded)
- Prototype with NuttX (current prototype)
- Use the network stack to create a simple UDP/IP example over Ethernet
- NSH (NuttX Shell) infraestructure set up
- Adjust DDS interfaces to match with NuttX (pseudo-POSIX)
- DDS compiling and linking on top of NuttX
- Code small enough to fit in RAM and ROM (refer to this discussion for an approximate size of RAM, current ROM image is about 700 KB)
- DDS chat application running
- DDS Debug Shell available
- Tinq-embedded <-> Tinq Desktop interoperability (DDS embedded - DDS Desktop)
- DDSIMU demo using ChatMsg type (Tinq Desktop to Tinq Embedded using the same DDS type)
- Tinq Desktop <-> OpenSplice Desktop interoperability
- Tinq Embedded <-> OpenSplice Desktop interoperability
- DDSAccel demo using a ROS Vector3 message
- ROSIMU demo using a ROS Imu message
- rcl embedded
- create
ros2_middleware_tinq - Hardware frontier
###Hardware
####STM32F4Discovery board
Initially we kicked off the prototype with the STM32F4Discovery board together with the STM32F4-BB (this daugher board provides Ethernet). The board is connected to the computer using USB. This connection is used to power up the board, program and debug (through STLINK). PD5, PD6 and GND are used as the serial connection (for development and debugging purposes, NSH, etc). An Ethernet cable is connected from the STM32F4-BB to the working station.

The size of Tinq and NuttX together made us switch into a board with more capacity the STM3240G-eval.
####STM3240G-eval

The STM3240G-eval board includes additional 2 MB SRAM. In order to set it up, connect the USB (flashing purposes, ST-Link), the Ethernet cable, the power connector and finally a 3.3V USB to serial cable:
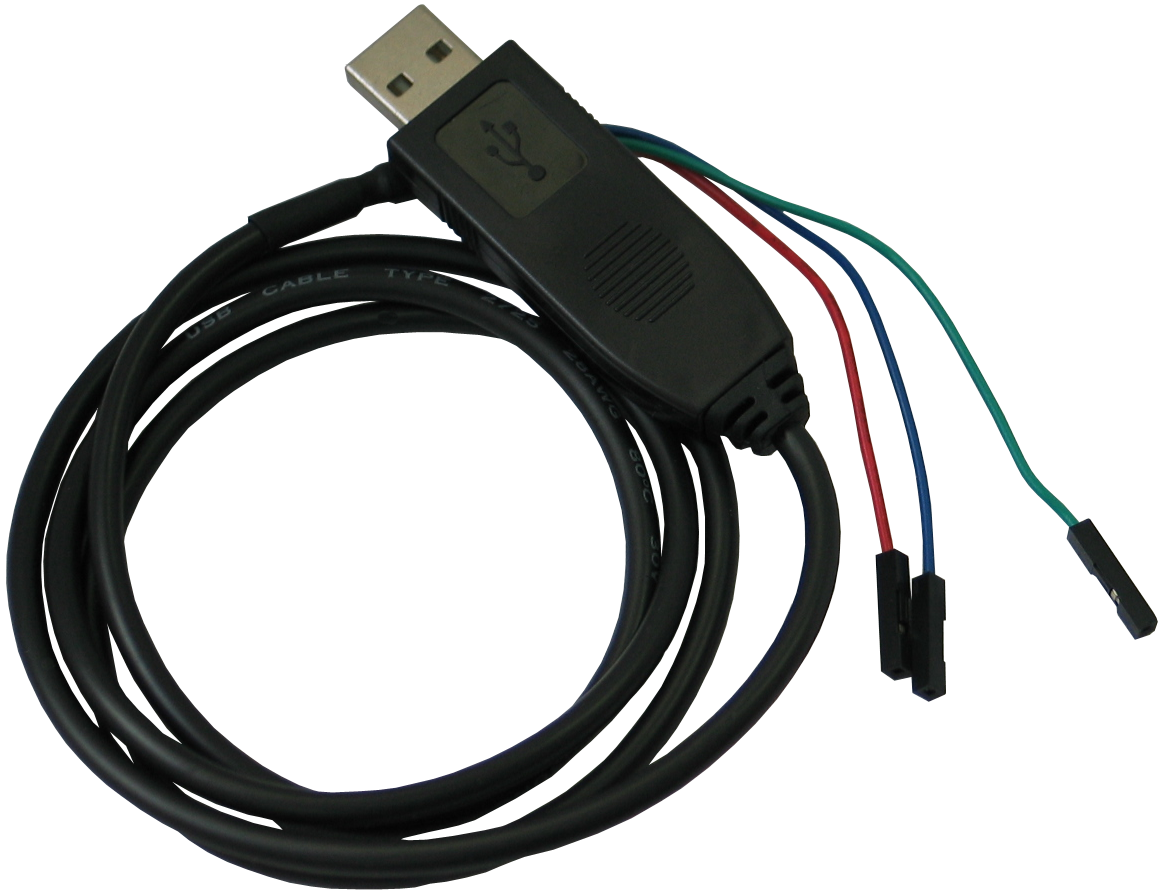
The TX, RX and GND signals should be connected to CN4 pins 36, 35 and 39 respectively.

To get a serial console type:
sudo screen /dev/ttyUSB0 115200(assuming that /dev/ttyUSB0 is the new device that appears when connecting the USB to serial cable)
###Setting it up
####Requirements Install the following requirements:
sudo apt-get install libssl-dev libxml2-dev pkg-config picocom screen libusb-1.0-0-dev gcc-arm-none-eabigit clone http://ymorin.is-a-geek.org/git/kconfig-frontends
cd kconfig-frontends/
sudo apt-get install autotools-dev autoconf gperf flex bison libncurses5-dev libtool
./bootstrap
./configure
make
sudo make install
sudo /sbin/ldconfig -vgit clone https://github.com/ros2/ros2_embedded_nuttx
cd ros2_embedded_nuttx
rmdir stlink
git clone https://github.com/ros2/stlink
cd stlink
./autogen.sh
./configure
make
cd ..cd tools
make openocd
cd ..For Tinq the one you need to use is:
cd nuttx/tools
./configure.sh stm3240g-eval/dds
cd ..(alternatively if you work with the STM32F4Discovery board do a ./configure stm32f4discovery/dds )
This configurations selects apps/examples/dds DDS application.
#####Building
cd nuttx/
make #####Programming To program the board:
make programThe output should look like:
make program
../tools/openocd/bin/openocd -f board/stm32f4discovery.cfg -c "init" -c "reset halt" -c "flash write_image erase nuttx.bin 0x08000000 bin" -c "verify_image nuttx.bin 0x8000000; reset run; exit"
Open On-Chip Debugger 0.9.0-dev-00112-g1fa24eb (2014-08-19-11:23)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.sourceforge.net/doc/doxygen/bugs.html
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
adapter speed: 1000 kHz
adapter_nsrst_delay: 100
srst_only separate srst_nogate srst_open_drain connect_deassert_srst
Info : clock speed 1000 kHz
Info : STLINK v2 JTAG v17 API v2 SWIM v0 VID 0x0483 PID 0x3748
Info : using stlink api v2
Info : Target voltage: 3.242300
Info : stm32f4x.cpu: hardware has 6 breakpoints, 4 watchpoints
target state: halted
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x080004b0 msp: 0x2000ce18
auto erase enabled
Info : device id = 0x10016413
Info : flash size = 1024kbytes
target state: halted
target halted due to breakpoint, current mode: Thread
xPSR: 0x61000000 pc: 0x20000042 msp: 0x2000ce18
wrote 655360 bytes from file nuttx.bin in 23.653700s (27.057 KiB/s)
target state: halted
target halted due to breakpoint, current mode: Thread
xPSR: 0x61000000 pc: 0x2000002e msp: 0x2000ce18
verified 646286 bytes in 5.552209s (113.673 KiB/s)
make: [program] Error 1 (ignored)Using picocom:
picocom /dev/ttyUSB0 -b 115200Using screen:
screen /dev/ttyUSB0 115200The advantage of using picocom is that you can scroll while screen does not offer that option by default.
To program the board:
make program#####Debugging
cd nuttx/
make gdb_serverIn another terminal (same directory):
make gdbThis prototype relies heavily on NuttX. It's recommended to rebase the code frequently with the master branch of NuttX git://git.code.sf.net/p/nuttx/git. The following steps show picture how to do it:
git remote add nuttx git://git.code.sf.net/p/nuttx/git
git fetch nuttx
git checkout master
git rebase nuttx/masterWe can review the memory consumed by the compiled image by:
cd nuttx
source tools/showsize.sh nuttxAs it's implemented in this prototype, an application has at least 6 threads:
- dds_thread_core: thread taking care of having a Domain Participant up and handling all the DDS core aspects
- A thread for each locator (4): This prototype includes a udp pseudo-poll implementation that uses a thread continuosly receiving on each locator (asociated with a file descriptor). The content is stored in a ringbuffer and fetched from the
dds_thread_corethread. - application threads: each application can launch its own threads using the NuttX primitives. E.g.: ROSIMU demo uses two more threads.
NuttX includes a simulator that allows to run the applications (with some resctrictions, refer to nuttx/configs/sim/README.txt) directly in Linux. A simple setup can be achieved through:
cd nuttx
make distclean # this is an important step to clean previous builds
cd tools
./configure.sh sim/nsh # make sure you have all the requirements in your Linux machine before compiling (e.g. zlib installed, ...)
cd -
make
./nuttx # you should see the NuttX shell ;)
IGMPv2
NuttX supports only IGMPv2 thereby in order to put force your Linux machine in this mode the following should be done:
sudo bash
echo "2" > /proc/sys/net/ipv4/conf/eth0/force_igmp_versionIf you wish to set if to the default value:
sudo bash
echo "0" > /proc/sys/net/ipv4/conf/eth0/force_igmp_versiontree -L 1
.
├── apps
├── tinq-core
├── misc
├── nuttx
├── NxWidgets
├── rcl
├── README.md
├── ros2_embedded.sublime-project
├── ros2_embedded.sublime-workspace
├── ros2_embedded.tmLanguage
├── stlink
└── tools
- apps: NuttX applications. The subdirectory
examplescontains some of the DDS apps. - tinq-core: Tinq's DDS implementation hacked to work with NuttX.
- misc: Variety of things.
- nuttx: The NuttX RTOS.
- NxWidgets: a special graphical user interface.
- rcl: ROS 2 Client Library (Ros Client Library) for embedded.
- README.md: this file.
- ros2_embedded.*: Sublime text configuration files.
- stlink: a modified version of stlink compatible with the implementations.
- tools: a set of useful tools for development.
Tinq's DDS implemmentation comes together with a DDS Debug Shell that has proved to be terribly useful to debug problems when working with DDS. The shell can be used prepending !! to any of the available commands:
!!help
Following commands are available:
ssys Display system-specific data.
stimer Display the timers.
sstr Display the string cache.
spool Display the pools.
spoola Display the pools (extended).
scx [<cx>] Display connections.
scxa [<cx>] Display connections (extended).
scxq Display queued connections.
sloc Display locators.
sconfig Display configuration data.
sdomain <d> <lf> <rf> Display domain (d) info.
<lf> and <rf> are bitmaps for local/remote info.
1=Locator, 2=Builtin, 4=Endp, 8=Type, 10=Topic.
sdisc Display discovery info.
sdisca Display all discovery info (sdisc + endpoints)
stype [<name>] Display Type information.
sqos Display QoS parameters.
stopic <d> [<name>] Display Topic information.
sendpoints Display the DCPS/RTPS Readers/Writers.
scache <ep> Display an RTPS Endpoint Cache.
sdcache <ep> Display a DCPS Endpoint Cache.
qcache <ep> [<query>] Query cache data of the specified endpoint:
where: <ep>: endpoint, <query>: SQL Query string.
sproxy [<ep>] Display Proxy contexts.
rproxy [<ep>] Restart Proxy context.
seqos <ep> Display endpoint QoS parameters.
scrypto <ep> Display entity crypto parameters.
sscache Display security cache.
rehs Request a rehandshake.
srx Display the RTPS Receiver context.
stx Display the RTPS Transmitter context.
sfd Display the status of the file descriptors.
asp <d> Assert participant.
ase <ep> Assert writer endpoint.
dtls Display DTLS connection related info.
spdb Display the policy database.
sfwd Display the forwarder state.
ftrace <n> Start forwarder tracing for <n> events.
d [<p> [<n>]] Dump memory.
da [<p> [<n>]] Dump memory in ASCII.
db [<p> [<n>]] Dump memory in hex bytes.
ds [<p> [<n>]] Dump memory in hex 16-bit values.
dl [<p> [<n>]] Dump memory in hex 32-bit values.
dm [<p> [<n>]] Dump memory in mixed hex/ASCII.
indent <tab> <n> Set indent type (if <tab>=1: use TABs).
taflags <flags> Set type attribute display flags.
<flags>: 1=header, 2=size, 4=elsize, 8=ofs.
server [<port>] Start debug server on the given port.
env Display configuration data (=sconf).
set <var> <value> Set the configuration variable to given value.
unset <var> Unset the configuration variable.
suspend <value> Suspend with given mode.
activate <value> Activate with given mode.
help Display general help.
exit Close remote connection.
The ROS Client Library (rcl) for embedded (implemented under the rcl directory) allows to code ROS applications using the ROS 2 API. Refer to rcl.h for a list of functions.
A simple ROS publisher can be coded with:
#include "rcl.h"
int ros_main(int argc, char *argv[])
{
/* Init the ROS Client Library */
rcl_init();
/* Create a ROS node */
create_node();
/* Init the dynamic types
TODO: abstract this code
*/
init_types();
/* Create a publisher
TODO: specify message types, topics, etc.
*/
create_publisher();
int i;
for (i=0; i<10; i++){
publish("Hola ROS 2, ¿como estás?");
}
}Refer to the rcl/README.md for further instructions on how to use the ROS 2 API to code applications.
Applications are coded at apps/ros. Refer to apps/ros/publisher for an example.
- Current example applications (e.g. the ROSIMU demo) publish at about 3 Hz. The reason behind this matter is the 4 threads (one for each locator blocked in a
recvfromcall) simulating UDP polling (refer to threading). Without these 4 threads (which are needed for DDS communication), the code has proved to be able to publish at up to 50 Hz. This limitation should be address by implementing real UDPpoll()orselect()support. Refer to nuttx official repository/TODO, particularly theUDP READ-AHEAD?andNO POLL/SELECT ON UDP SOCKETStickets. - Reception of packages: As mentioned before, this prototype implements UDP
poll()using 4 threads (one for each locator) blocked "reading" all the time. If a package arrives and there's nobody reading (the corresponding thread should be scheduled at that time) then the kernel dumps the package. This causes that only "some packages" coming from the publising side will be received and processed properly. This log presents therosimu_subscriberapplication running in the embedded board and receiving packages from the Desktop (running OpenSplice). Theheader.seqshould increment by one every time however we are getting4,11,19,28, ... - Tinq QoS parameters hasn't been tested. There's no guarantee that it'll work.
- In NuttX we can't simultaneously read and write from a socket (refer to brunodebus/tinq-core#7 (comment)). Tinq has been implemented with this assumption in mind thereby a set of fixes were applied to make it work.
- The implementation does not support different message types with the same topic name (issue). Refer to the discussion.
- Tinq implementation does not interoperate with RTI's Connext. Refer to the issue.






















































































