iliasam / opentoflidar Goto Github PK
View Code? Open in Web Editor NEWOpen Source TOF Lidar
Home Page: https://habr.com/ru/post/485574/
License: MIT License
Open Source TOF Lidar
Home Page: https://habr.com/ru/post/485574/
License: MIT License

















































































































































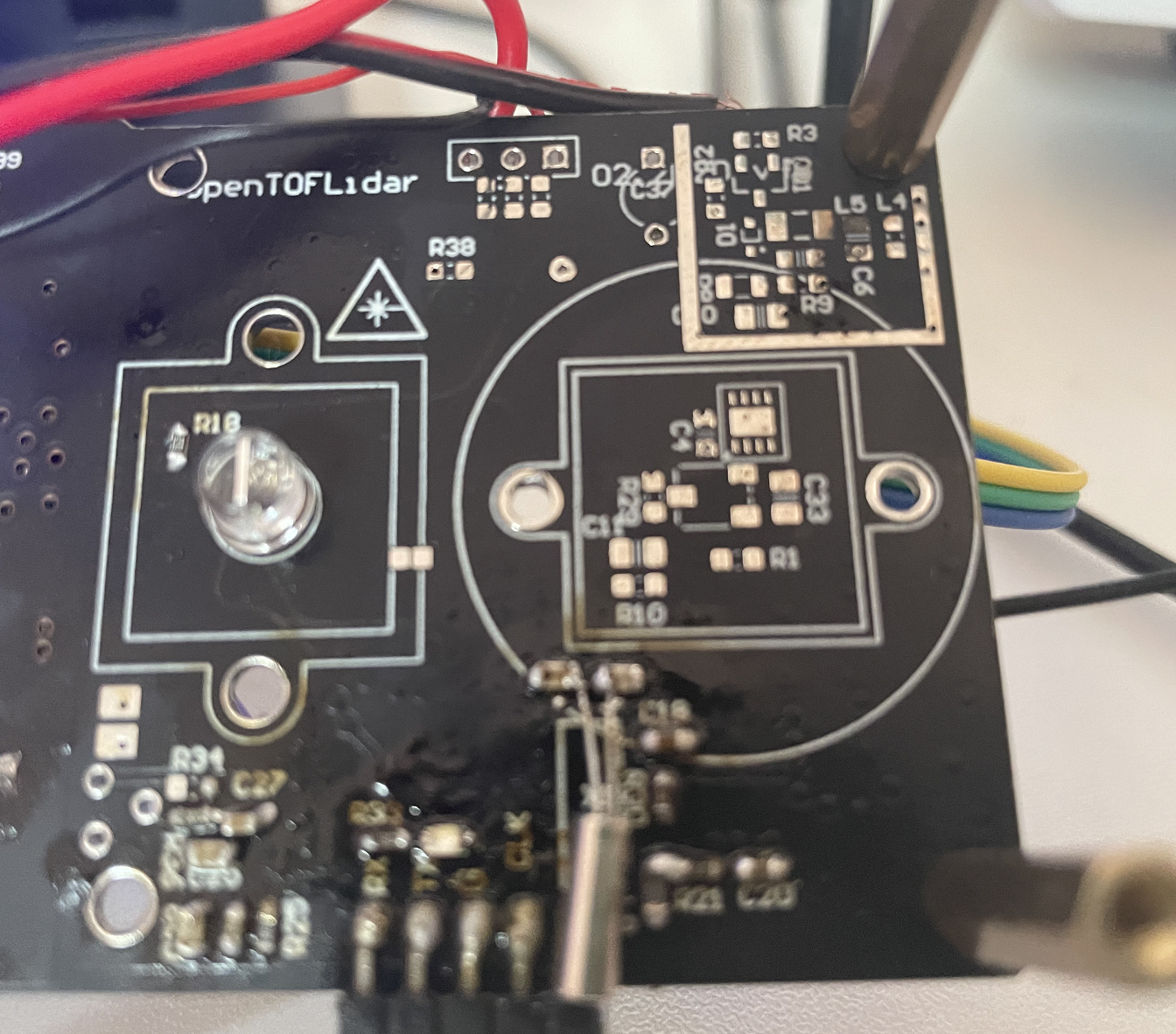
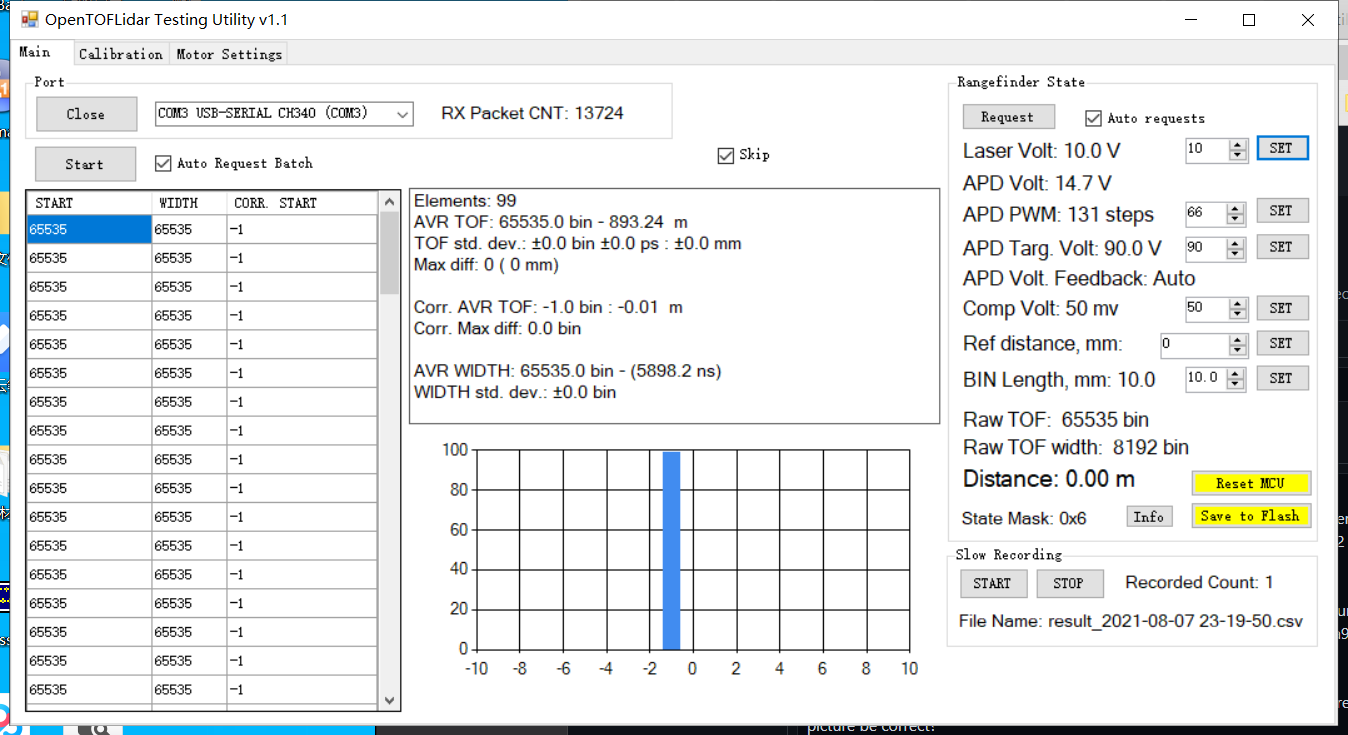
I soldered these components on PCB under your instruction note " #2. install TDC, its quartz. Enable "Auto Request Batch" in utility. There must be pulses at "LASER_PULSE" net. ", and I use an oscilloscope to see the signal on LASER_PULSE net, are these data in the following picture correct?
The test PC utility:

The oscilloscope:

Thank you in advance!
Hi, iliasam.
I have uploaded 'not_scanning_fw_pcb_v4.hex' and the
and noticed that the LED is blinking.
I also checked the 'Laser_Pulse' of the TDC and found that a pulse of about 3V is generated.
I also checked that the voltage of the Vlaser is changing the same as what I set in the Testing Utility.
However, if you look at the picture I attached, you can see that many of the items in the Rangefinder State have been changed to
indicating a 'N/A' state.
Since the voltage is set normally and various values are recorded through 'Start', it seems that the serial communication is working well, but can you tell me why 'N/A' appears?

Hello, can you tell me why my J1 pulse is like this?

Hello, I have a question for you, I recently came across a piece of code in my project which uses the MS1005 chip using the stop1 channel and stop2 channel connected to the same pin. A rising edge trigger and a falling edge trigger can be used to get the pulse width and use this pulse width to calibrate the distance measured. May I ask why it does this and how it calibrates the distance


Here is the schematic for this project
XU_MAIN_v13.pdf
Thank you!
hello, you have done a great job on this project! I'm working on a sanning lidar based on polygon mirror, I have a critical question. Did you ever meet an issue that when laser rays emit to the mirror, some rays are then directly deflected to the APD lens and received by APD? In that case the distance measured is not right due to this kind of light interference. In my design, I have to use a plastic isolator to block this interference. I don't know is there such interference in your design, or the lidar system is not effected by this kind of interference due to TIA threshold, or TDC principle, etc.
Thank you and good luck!
Kind regards,
Clint
Hello, there was no pulse in my previous TDC. At that time, the request of the program was correct. Now TDC has a pulse and it becomes N/A. Does this mean that my single chip microcomputer is broken?




I measured the VLaser at the J2 terminal, but could see that it did not match the ideal waveform you posted (LaserV_10~16V).
I could see that the amplitude was very large, around 13V, and the overall shape didn't match either.
I measured from J2 using the U.FL terminal and the measurement instrument was a Tektronix TDS 2012C.


I got the error "bit2 (0x4) - Wrong hits number from laser comparator" as shown in the photo above and I can't proceed any further.
What can I do to fix a situation like this?
Hello, I would like to increase the power output by increasing the pulse width to be as close to the maximum (I believe 100 ns?) as possible and also increase the frequency from 1 kHz to maybe 5 kHz or 10 kHz.
Would you point me to where I could change this in the code? Can I increase the pulse width by using a larger capacitor?
When doing "6.Install APD DC-DC components (Q1 and others). Check "APD_V" - it must change by manual commands from utility."
I found I only could adjust the APD Volt in scope 0 ~ 59.8V, like below pictures, whatever I changed the APD PWM and APD Targ.Volt. Should it be correct?






Hi, First wanna say thanks. Very well explained and well documented.
I want to make one of these, but when I upload the gerber files it seems some of the components footprints have no designator. Can you provide a complete Gerber files. Thanks
Below are the pictures of both versions.




I am using encoder disc with 100 slits in it instead of 65 slits you used. I could not found encoder disc with 65 slits.
So I changed the parameter "ENCODER_HOLES_CNT" to 100 (reference is attached below) and tried recompiling the code in the latest IAR IDE but it gives the following error during compilation.
OpenTOFLidar/Firmware/scanning_fw/config.h
Line 185 in d2ed102
Here is the screen-shot of the error

When I open your project files, the IAR software ports the old project file to an updated project file in the new version. Is the error because of this? If so what version you used for the successfully compilation?
I use mavlink_tof.xml to generate mavlink.dll , but it is different from your mavlink.dll。
Or where should I go to get the project to your mavlink.dll。
thank you。
Hi,
amazing project!
I am wondering what are the raw values you get from the photo receiver.
In particular, can you see multiple responses with different intensities for a single laser beam?
For example when looking at a glass surface can you see the response of the glass and the response from a structure behind the glass?
Hello! Great project! Thank you so much for developing this.
I originally thought that the laser is only pulsing when "start" or request batch is pressed in the PC utility in no scanning mode, however, using a photodiode, it seems that the laser is constantly pulsing at 1KHz even with no command from PC utility. I just wanted to check that this is as designed?
Hi, I noticed that the motor that you are using, it has a ribbon cable instead of normal wires. Could you please tell me how it connects to the PCB board? Thanks.
Hi,
Whats this REF_PLATE_DIST variable?
is it this back plate?

Or is it this top plate distance?

Hi, iliasam,
I am working on step #4Install MOSFET, Laser diode, diode D7, and other lasers components. Check that laser is working by the camera. Do not look to the laser!! Check laser current pulses by connecting J2 to the oscilloscope. Current must change with changing "Vlaser".
however, I can not see the laser light on my iPhone camera, how do I make sure that is working?
And I get the J2 oscilloscope picture like below ( because I do not have 0.1R resistance, so I use a 0.3R one), does the blow picture be correct?


Thanks in advance!
Hi, after I install the AD500-8 and lens. I got this picture. ( it is toward to my ceiling)

I do not know how to set the lens at a proper focus point. I will try to find some answers in your wiki.
I did my first run but I am not getting the distance measurement. Any clue?

and I also changed encodre count to 20,
My encoder gives digital output 3v.


I have been able to get a two-dimensional point cloud. I would like to DIY a low-cost 3D scanner based on your design. What do you recommend? thanks

Hello, I installed the motor and downloaded the scanning program today, but my motor doesn't rotate after downloading. After I set the PWM value of the motor, the motor will rotate a little bit. I want to know what the reason is. Can you help me?
This is an amazing project, you did a great job! I have a few questions regarding some of the details.
In this image I see you are connecting an antenna to the orange pi PC, could you please tell me what this is for? You mentioned that the ROS node and hector SLAM runs on the orange pi, but are you still transmitting any data from the orange pi to your PC?
Also if you're running the SLAM software on the orange pi, how are you displaying the scanning results in real time? Since the orange pi is not connected to a monitor.
Thank you in advance for your time and help!
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
{kind=link}