
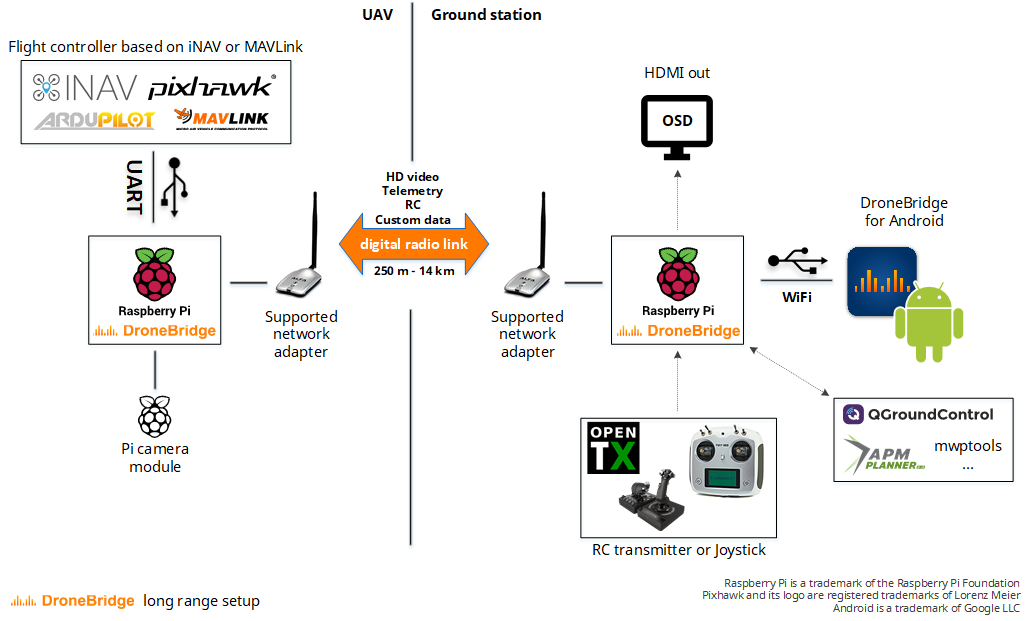
DroneBridge is a system based on the WifiBroadcast approach. A bidirectional digital radio link between two endpoints is established using standard WiFi hardware and a custom protocol. DroneBridge is optimized for use in UAV applications and is a complete system. It is intended be a real alternative to other similar systems, such as DJI Lightbridge or OcuSync.
DroneBridge features support for Raspberry Pi, ESP32 on the UAV/ground station side and an android app.
Visit "Not just another drone project" for additional information about the project and its goals
Please read the getting started guide The v0.7.0 release is recommended.
Disclaimer: Use at your own risk. Malfunction and sudden signal loss can not be ruled out. Use with caution! Do not fly over people or animals. The user is responsible for:
- Operating the system within legal limits (e. g. frequency, equivalent isotropically radiated power (EIRP) etc.)
- Any harm or damage caused by using the provided software or parts of it.
Use with caution. RC link has a too high latency. USB connection to DroneBridge for Android is unstable.
DroneBridge Alpha v0.7.0 alpha Image for Raspberry Pi

- 300 m - 14+ km range* (500 m - 2 km with standard hardware)
- 1080p video
- 110ms glass to glass latency (using android app)
- Cheap: starting at 80€ for hardware
- 12 channel RC
- MAVLink support - LTM telemetry deprecated. Use with mwptools, QGroundControl, Mission Planner etc.
- iNAV & MAVLink based flight controller support
- Bidirectional
- Fully integrated app for Android
- OSD
- Modular - Write your own powerful plugins
*Range strongly depends on your setup, environment and legal framework.

- Easy to use UI & end point of the whole DroneBridge system
- Low latency video decoding
- Change settings, calibrate the RC, view telemetry
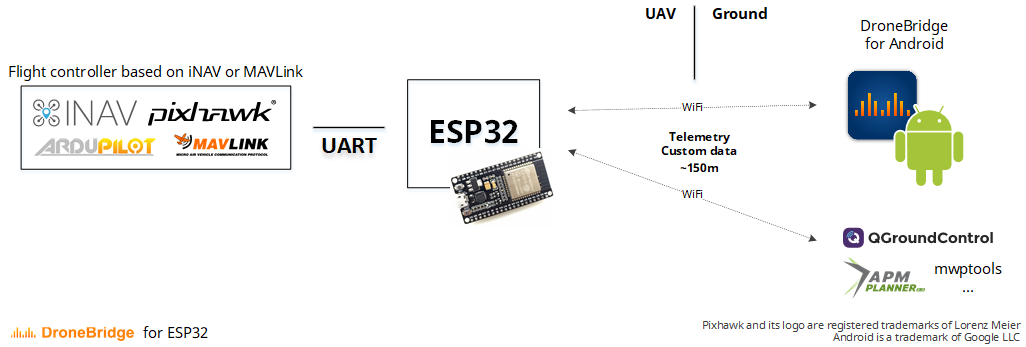
DroneBridge is available for the Raspberry Pi & ESP32 (no video, telemetry only - WiFi based) By compiling the libraries on your Linux computer any device can become an AIR or GND unit. This means DroneBridge is not restricted to the Raspberry Pi. However many single board computers do not offer the same kind of stability and hardware/software support as the Raspberry Pi (camera, H.264 en-/decoding etc.).
For further information have a look at the DB for ESP32 main page
DroneBridge is highly modularized to provide flexebility and make development easy. There is a common library for Python 3 and C/C++ that handles everything involving the DroneBridge raw protocol. It configures the sockets, inits the protocol and provides methods for easy transmission. Instead of the Android app any other GCS can be used.

- More documentation
- Add MavLink and MSP waypoint missions editor to Android App
- DroneBridge Cockpit: A client/OS for x86 systems to monitor and control your UAV
- See milestones
Check out the wiki Check out the milestones and suggest new ones! Join the Gitter room and discuss issues, ask questions or give feedback
There is a nightly branch with the most up to date code! It is not guaranteed that the code in that branch is working or even compiling!
Feel free to ask questions & contribute
- All of the code (especially DroneBridge modules & lib_dbcommon - C or Python) is under the Apache 2 license if not specified otherwise
- WifiBroadcast legacy code (video, OSD, .profile, hello_video) is licensed as specified or under the GPL v2 license
- All Kernel drivers/patches are under GPL v2 license






























































































































































