![]()
![]()
![]()
![]()


Dockerfiles to provide HTML5 VNC interface to access Ubuntu Desktop + ROS2, based on AtsushiSaito/docker-ubuntu-sweb
ROS 1 version: https://github.com/Tiryoh/docker-ros-desktop-vnc
There are official ROS 2 Docker images provided by Open Robotics.
https://github.com/osrf/docker_images/blob/master/README.md#official-library
このツールの詳細については以下の記事で紹介しています。
The details of these tools are written in Japanese on this page.
https://memoteki.net/archives/2955
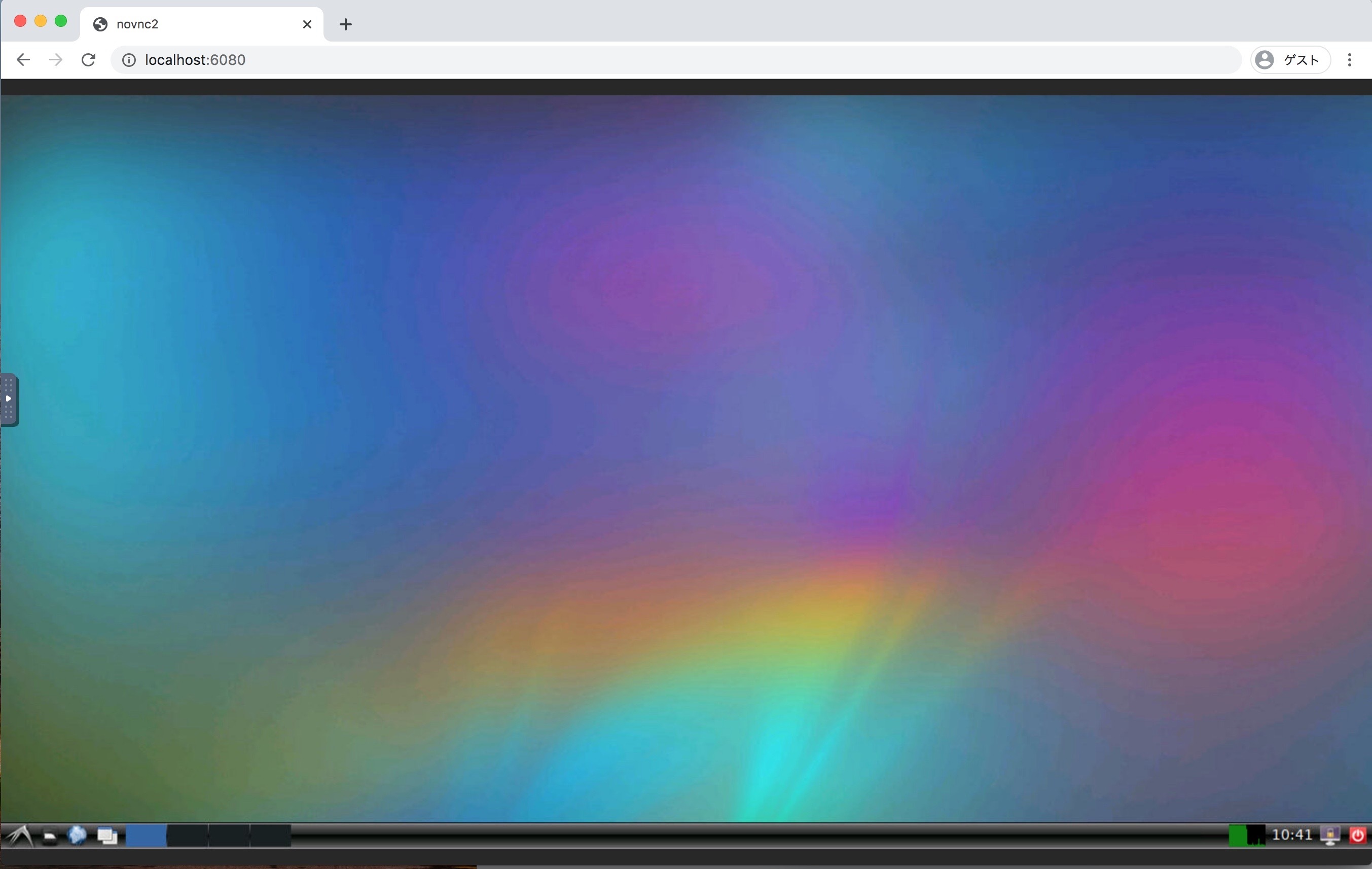
Run the docker container and access with port 6080.
Change the shm-size value depending on the situation.
NOTE: --security-opt seccomp=unconfined flag is required to launch humble image. See #56.
docker run -p 6080:80 --security-opt seccomp=unconfined --shm-size=512m tiryoh/ros2-desktop-vnc:humble
Browse http://127.0.0.1:6080/.
To build Docker image from this Dockerfile, run the following command.
- dashing (deprecated)
cd dashing && docker build -t tiryoh/ros2-desktop-vnc:dashing .- eloquent (deprecated)
cd eloquent && docker build -t tiryoh/ros2-desktop-vnc:eloquent .- foxy (deprecated)
cd foxy && docker build -t tiryoh/ros2-desktop-vnc:foxy .- galactic (deprecated)
cd galactic && docker build -t tiryoh/ros2-desktop-vnc:galactic .- humble
# using "docker build"
cd humble && docker build -t tiryoh/ros2-desktop-vnc:humble .
# using "docker buildx" (amd64)
cd humble && docker buildx build --platform=linux/amd64 --progress=plain -t tiryoh/ros2-desktop-vnc:humble-amd64 .
# using "docker buildx" (arm64)
cd humble && docker buildx build --platform=linux/arm64 --progress=plain -t tiryoh/ros2-desktop-vnc:humble-arm64 .- iron
# using "docker build"
cd iron && docker build -t tiryoh/ros2-desktop-vnc:iron .
# using "docker buildx" (amd64)
cd iron && docker buildx build --platform=linux/amd64 --progress=plain -t tiryoh/ros2-desktop-vnc:iron-amd64 .
# using "docker buildx" (arm64)
cd iron && docker buildx build --platform=linux/arm64 --progress=plain -t tiryoh/ros2-desktop-vnc:iron-arm64 .- jazzy
# using "docker build"
cd jazzy && docker build -t tiryoh/ros2-desktop-vnc:jazzy .
# using "docker buildx" (amd64)
cd jazzy && docker buildx build --platform=linux/amd64 --progress=plain -t tiryoh/ros2-desktop-vnc:jazzy-amd64 .
# using "docker buildx" (arm64)
cd jazzy && docker buildx build --platform=linux/arm64 --progress=plain -t tiryoh/ros2-desktop-vnc:jazzy-arm64 .- rolling
# using "docker build"
cd rolling && docker build -t tiryoh/ros2-desktop-vnc:rolling .
# using "docker buildx" (amd64)
cd rolling && docker buildx build --platform=linux/amd64 --progress=plain -t tiryoh/ros2-desktop-vnc:rolling-amd64 .
# using "docker buildx" (arm64)
cd rolling && docker buildx build --platform=linux/arm64 --progress=plain -t tiryoh/ros2-desktop-vnc:rolling-arm64 .dashingwhich is based ondashing/Dockerfileeloquentwhich is based oneloquent/Dockerfilefoxywhich is based onfoxy/Dockerfilegalacticwhich is based ongalactic/Dockerfilehumble,latestwhich is based onhumble/Dockerfileironwhich is based oniron/Dockerfilejazzywhich is based onjazzy/Dockerfilerollingwhich is based onrolling/Dockerfile
Docker tags and build logs are listed on this page.
https://github.com/Tiryoh/docker-ros2-desktop-vnc/wiki
- https://github.com/atinfinity/nvidia-egl-desktop-ros2
- Dockerfile to use ROS 2 on Xfce Desktop container with NVIDIA GPU support via VNC/Selkies(Full desktop streaming with WebRTC)
- https://github.com/fcwu/docker-ubuntu-vnc-desktop
- Dockerfile to access Ubuntu Xfce/LXDE/LxQT desktop environment via web VNC interface
- https://github.com/AtsushiSaito/docker-ubuntu-sweb
- Dockerfile to access Ubuntu MATE desktop environment via web VNC interface
This repository is released under the Apache License 2.0, see LICENSE.
Unless attributed otherwise, everything in this repository is under the Apache License 2.0.
Copyright 2020-2023 Tiryoh <[email protected]>
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
- This Dockerfile is based on AtsushiSaito/docker-ubuntu-sweb, licensed under the Apache License 2.0.
- This Dockerfile is based on fcwu/ubuntu-desktop-lxde-vnc, licensed under the Apache License 2.0.

![dependabot[bot] avatar](https://avatars.githubusercontent.com/in/29110?v=4 "dependabot[bot]")





















































































































