modi1987 / kst-kuka-sunrise-toolbox Goto Github PK
View Code? Open in Web Editor NEWA ToolBox for controlling KUKA iiwa robot from matlab:
Home Page: https://youtu.be/eh5s8PTe5VM
License: MIT License
A ToolBox for controlling KUKA iiwa robot from matlab:
Home Page: https://youtu.be/eh5s8PTe5VM
License: MIT License

















































































































Hello sir, I need a simple favor from you please can you help me, please
My robot : LBR KUKA IIWA 14 R820
I configure the 2F 85 Robotiq Gripper successfully by following https://github.com/ELZo3/RobotiqGripper-2F85-EtherCat-Control
But now How can I start with a simple manipulation task where I just put an object in a known position and program the robot to ensure pick and place simple tasks?
Please help !!
Hi... Thank you for such a wonderful toolbox and such a good documentation. Really appreciate your work. I am trying to solve some problem but can not find it in the manual.
I could not find how I can specify the mass and the center of mass of the end-effector. I have looked through the user guide and example ... but I can not see it. Is it possible? Thank you for your help.
I want do some joint torque control, but I did not see any related function
Hi,
May I ask you some questions about the configuration of iiwa.
1.Which software packages should I install in iiwa if I want to do researches about force and torque?
2.Did you use FRI in your researches?
I would appreciate it if you could help me.
I am trying to calibrate my 14R820 with a RGB-D camera, particularly aligning timestamps by synchronising them with the system clock on my laptop. I noticed in the KUKA Servoing and Programming documentation, that there are commands for polling timestamps of when the setDestination and update commands were used (as well as other timestamps for non-servoing operations, but these are of less interest to me I think). I have looked through the KST server code, client code and documentation, but I couldn't see anything. I wanted to confirm that this was the case, and ask for your suggestion on how to handle this in the mean time - I noticed in some of your examples you simply use the MATLAB tic-toc functions.
Hi, I really like your toolbox. Thanks so much for sharing this!
I was trying to run some of your examples and I found out that a function was missing for the SpaceMouse Tele-operation example script.
mouseSpeed = speed(MOUSE, vector); gave me an error. If this is expected, would you be able to share this speed function?
Thanks!
-- Andy
Hi,
I‘ve already synchronized the MatlabToolboxServer .But when I run it,the program doesn't work and the error is about lbrExampleApplications-BackgroundTask.java in line 79 196 and some Unknown Source.I just add the KST_1.6_iiwa7R800_Universal_noFlange in the old lbrExampleApplication in an old sunrise project,because my classmate says create a new project would cover other's program.And when I copy the KST_1.7_iiwa_universal_noFlange_LTS and choose the software Direct and Smart,the PTPmotionClass.java has some problems that can't synchronize.
And when I establish the connection in Matlab,it works and show the 'Connection established',but the next line show that 'Could not attach the tool to the Robot'.
Someone says maybe the Java program has some problems,but I watch the tutorials that you could work.So I just wanna seek some advice if it is our iiwa's problems or I should change some softwares or so on.
Thanks a lot.
Hello,
I am trying to use a wireless 3D mouse in Tutorial_teleOperation.m using KST after watching
this video on YouTube.
My question is twofold, depending on the OS:
[On Windows] How could one get a wireless 3D mouse recognized by vrspacemouse? I tried ID = 'USB1', but it failed to recognize. The ID worked perfectly when wired though. Could you please suggest what ID would be appropriate for a wireless 3D mouse on Windows?
[On Ubuntu] I am also wondering whether it would be possible to use a 3D mouse (either wired or wireless) for running the Tutorial_teleOpeartion.m example on Ubuntu? If possible, what would be the ideal way to make the wired/wireless 3D mouse identified or recognized by vrspacemouse?
Many thanks for your great work and thanks in advance for your help!
I am going to test your toolbox. The aim is to control the robots from a VR headset. However, right now I am struggling in synchronizing the MatlabToolboxServer onto the iiwa controller.
The project shows no errors, but when the synchronization begins, it fails in the middle with the following warning.
"The child nodes of catalog elements 'RootItem path="com.kuka/Project", usage=Topology, selection=1, Username: Project' and 'RootItem path="com.kuka/Project", usage=Topology, selection=1, Username: Project' are not compatible between the projects to be synchronized"
Can you check what could be the reason. I will try to check this on my own as well and update if I find a solution.
Hello,
How can I obtain with a regular frequency (for instance 30Hz) the robot pose?
Best,
Tommaso
Hello, I have seen the function "StartHandGuiding". Is there way to stop the mode from the client side (i.e. the computer)?

Why This Error Happening ?
Hello,
I have been trying to use KST_1.7_iiwa_universal_noFlange_LST. But unfortunately I have encountered the following error: com.kuka.generated cannot be resolved.
I am using a KUKA iiwa R800 with Sunrise Workbench 1.14.1.15. No end effector attached.
Hi, Dr. Safeea,
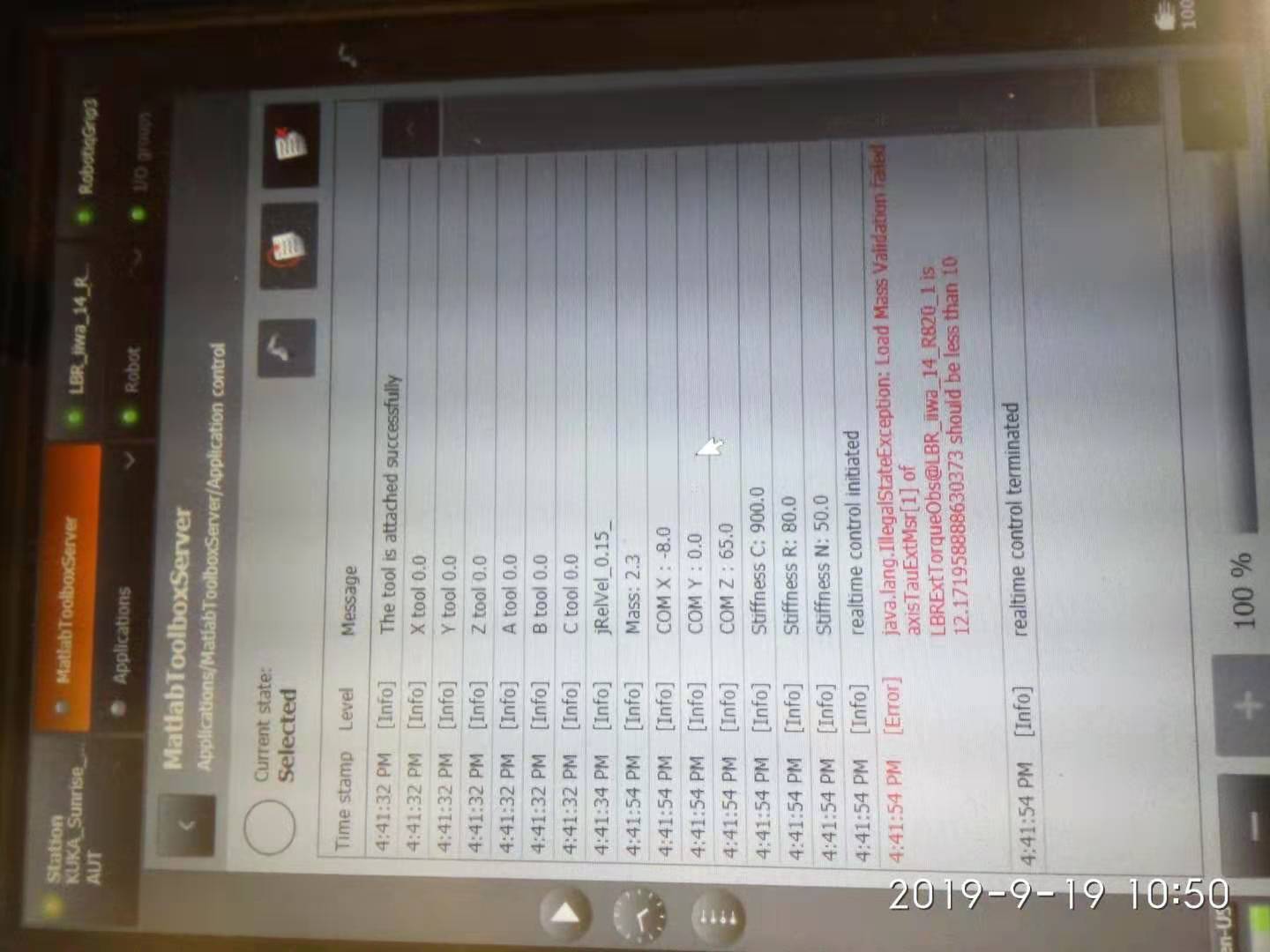
I’m Tian. After dealing with the previous problems, we run the demos in the KST, which are really wonderful! However, not every demo can be run successfully, such as the ‘KSTclass_Tutorial_realTimeImpedencePlotTorqueFeedBack.m’.
Our tool mass is 2.3 kg, the COM is [-8,0,65] mm. The parameters are found in our gripper manual. Firstly, we use these parameters, but some errors appear in the SmartPad and the matlab, which said 'java.lang.IllegalStateException:Load Mass Validation Failed axisTauExtMsr[1] of LBRExtTorque@LBR_iiwa_14_R820_1 is 12.171958888630373 should be less than 10'. The errors are shown below. I have also tried to modify and use different tool parameters in the matlab code, but it does not work. Besides, I also search the solution in Google and Github, but I find no solution to this.
In addition, about the KST gamepad demos, we can run them successfully, and we can use the left handle of gamepad to select different axis of iiwa, but we cannot move the joints by using the right handle of gamepad. We really don’t know why.
We will appreciate your help very much if you can help us analyze these problems! Especially the impedence control demo!
I’m really sorry to disturb you so much and looking forward to your reply.
Best regards,
Tian Xu.

Thanks for the code. Very good work.
It seems that the DLSSolver does not give a correct solution on my setup.
I changed the flange length in the direct kinematics and made sure in my KST class the dh parameters are matching to the flange. I also tried both kukaDLSSolver and kukaDLSSolver_1. The robot was able to move to the given joints, but the EEF position does not match the input of the DLSSolver (almost always with ~30mm offset). Because the DLSSolver is masked by .p file, i couldn't really debug this. Any idea where I should look into?
An update: If I set the flange to be "KST.None", the DLSSolver can give a correct answer. It seems to me that the DLSSolver is solving for a basic flange by default, which probably should not be the case, since we were given an option in the KST constructor.
Thank you again for the great codes.
Hi, I follow the youtube video here, really great work.
Our lab recently borrowed an iiwa 14R and would like to use it for some project.
However, the original lab didn't buy the sunrise.servoing module, so we cannot control this robot from ROS, as mentioned here (https://github.com/IFL-CAMP/iiwa_stack/wiki).
For your package, does it also need the module?
Thanks.
Hello there,
I was following your video tutorials because I am interested in the hand guiding system. However, I get an error. Specifically with the "PTPmotionClass.java" file. Sunrise tells me that it can't import "com.kuka.generated.ioAccess.MediaFlangeIOGroup". The exact message is:
The import com.kuka.generated cannot be resolved
I search everywhere on the internet but I cannot find any information about this module.
Do you know why the code is having this problem on my computer?
Thanks in advanced.
Hi
i'm following the video tutorial to install the kuka sunrise toolbox on the controller site. I had set my static IP to 172.31.1.150 and i can ping the controller and I have activated the smart and direct servo packages just as in the tutorials. However I get this errors when pressing the install button. I got all these errors

Anyone know how to solve them?
Hi all, this is a very useful and stable package, I would like to thank all the authors and contributors!
When I am using the DirectServo, I found that with end-effector, the robot may drop a little and then return to the desired position. Especially for flange pivoting, the position of flange may differ from 2-3 mm, which is what I do not want. This is very similar to the question described in another package: epfl-lasa/iiwa_ros#56.
Does anyone have any idea on how to modify the control mode into pure position control? Thank you!
Best,
Yitian
Real time control of robot using space mouse,Provide python examples?
Dear Dr. Safeea,
I’m following your KST tutorials and I encounter some problems.
I’m now trying to import KST to SunriseWorkbench (Version 1.7). But there are some error icons near the copied java files. I have added the Direct Servo Motion Extension and Smart Servo Motion Extension in the StationSetup.cat, however, the errors still exist. The specific error messages are listed in the attachment below.
I have tried to select different media flange when establishing a new project and to use different KST version from KST_1.6 to KST_1.7, but they are no use. Could you help me analyze the reasons of the problems that I have? I really don’t know how to deal with it.
Thanks a lot.
Tian Xu.
Error Messages.pdf
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.