bitdump / blheli Goto Github PK
View Code? Open in Web Editor NEWBLHeli for brushless ESC firmware
License: GNU General Public License v3.0
BLHeli for brushless ESC firmware
License: GNU General Public License v3.0















































































































































































































Power up, arm. throttle max.
And after this I decrease throttle to zero and in the moment when motor almost stop (ALMOST) I rapidly increase throttle to max again. Result: motor twitching instead of rotation, heats up and smoke.
Can you explain why this situation occurs?
And why all 4 my motors sounds a little cracking noise while running on low speed?
Could you rename these to "H-KING **A Fixed Wing" to make it clearer what you are referring to as I just realised I bought the wrong ESC.
Hi everyone!
I'm using Emax 20A modules with BLHeli firmware and noticed a strange motor behavior.
Motors start spinning on short PWM impulses:
< 1000uS - off
< 780uS - slowly spinning and turning off
< 480uS - spinning wildly
If my guess is correct the ESC thinks that these PWM impulses come in high-frequency PWM mode (which they are not, the frequency is still 400Hz).
That seems a little bit dangerous because if you unplug the PWM signal cable during the PWM generation the impulse gets cut and the motor starts spinning. I've just observed such behavior which made me investigate that issue.

I'm running BLHeli 13.2 on BlueSeries 12A that I got from witespy. They have SimonK bootloader and BLheli 13.2 that I flashed. Below are the settings.

I have an issue with 2 out of 4 motors on my quad, once it's powered up and the very first spin up, 2 motors surge for 3-4 times before they begin working normally. The motors are Emax MT1806-2280KV. Once they finish surging it seems they become in-sync and everything works perfectly. However each time I arm for the very first time with a new pack, this happens. The video can be seen here on youtube:
https://www.youtube.com/watch?v=ZwQsB-z2tB0
I tried recalibrating many times, this is not the case.
This can be reproduced one of two ways:
Either by arming the quad on the first bootup or by bring up the slider in cleanflight to max (as in this video) at very fast speed. If I'm using the slider and I spool up slowly this issue is not visible. However this happens every single time I arm the quad after the battery had been changed.
Thank you so much,
Vadim
Hello,
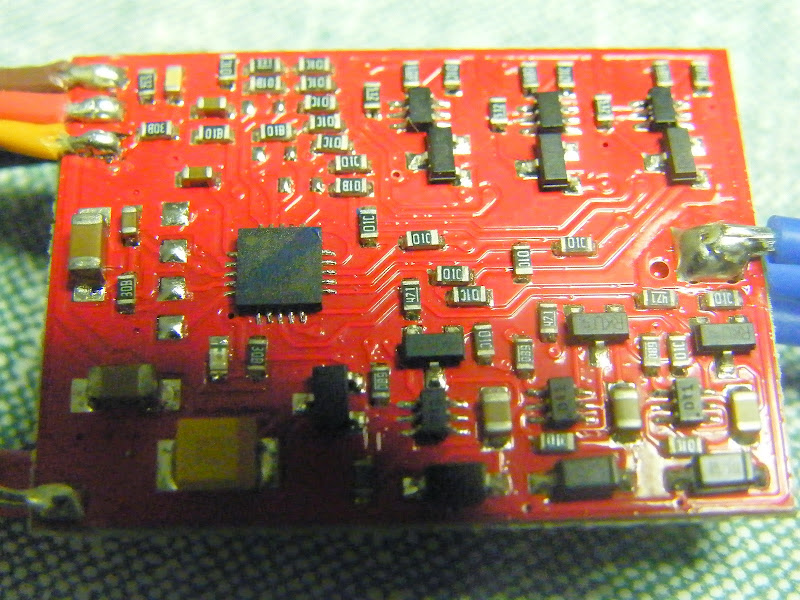
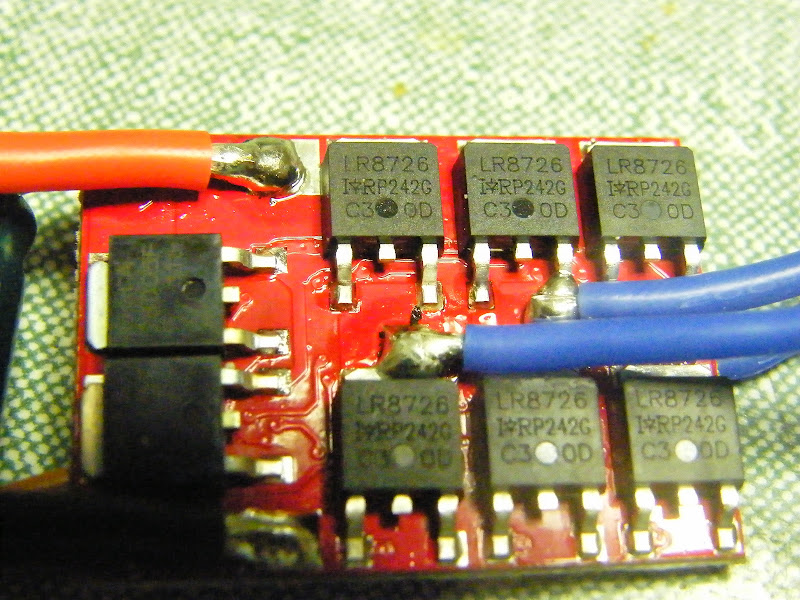
I recently bought HobbyWing SkyWalker Quattro (20Ax4) and found out that they are C8051F330 based all N-FET ESCs. Each of four ESCs is powered from the single onboard BEC, but you may consider each ESC as independend one. I believe you will find flash pads designations pretty familiar. Please refer to photos here: http://drug123.org.ua/skywalker_quattro/
I've tried to flash ESC with BLHeliTool (c) OlliW @ www.olliw.eu from 16. October 2012 v0.07 with BLHeliHexFiles\SKYWALKER_20A_MULTI_REV8_0.HEX firmware. I have got the following output in the tool:
Flash hex file... Please wait!
delay... OK
v... OlliW SilProg v0.08 PB3PB4
r... rok
d... dok0A -> Device ID 0A F33x
i... iok
e... Device erase FAILED!
When I hit Verify button, the following error is reported:
Verify... Please wait!
delay... OK
v... OlliW SilProg v0.08 PB3PB4
r... rok
d... dok0A -> Device ID 0A F33x
i... iok
.Block read FAILED!
I'm not experienced with 8085 programming but believe there is some lock bit is set. Could you please advise if this could be worked around somehow.
Thanks.
PS: I consider a chip replacement if it is impossible to remove lock from the chips. How do you think, is it usable approach?
http://diydrones.com/profiles/blogs/steps-toward-esc-feedback-using-simonk
I read that Simonk can return the interval between last switch current.
Does BLHeli support these kind of thing? and on what ESC?
Hello, i received 4 emax 40amp simon series ESC.
I surprised when i open the esc do reflash end encountered an silabs mcu.
The motors i used is the old multistar 4225-610Kv / 16 poles
On the first one i made some test with blheli 13.2 using an 3 battery and every thing work fine.
Very smooth, no sync loss .
When connect to 6s battery it started and worked fine on the first two tests.
When i put throttle for the third time the esc fried.
I reflash the second esc and this time i used a 50w carc bulb in series with esc.
It start on the first and second attemp. On the third the esc reset. It occur because the esc consume too much current.
Soh i made some more tests.
I see that when i remove te throttle the motor spin down and after some threshold rpm the esc apply some break.
When i try to restart the esc reset.
If i reduce the speed very slow the motor stop and start without problem.
Wen i reduce the speed very fast the esc apply the break and when i restart the esc reset.
I not sure you understand my poor english.
If you like i can make a video.
BTW, i do the smae test with other ESC and the same MOTOR and it worked fine.
can you help with this issue ?
I know this isnt really useful for heli flyers, but I'd like to be able to throw my ESCs into reverse on my quadcopter. Is there any way of doing this?
I noticed theres an option in the config tool to be able to reverse the ESC, but not allow for both directions. Ideal would be mid stick is 0 throttle. So this should be a software thing right?
My setup:
4x hobbywing skywalker 40A UBEC flashed with blheli using arduino uno. freaking awesome by the way!
4x EMAX 2815/05 1500kv
8" props
3300 mah 4cell turnigy battery
arduino due flight controller
Some links:
https://vimeo.com/61127136 warthox doing 3D flying with quad ESC reversal.
https://github.com/fluentart/drone2 my firmware I'm developing and plan to add reversal support to.
https://github.com/c---/MultiWii3D has reversal with simonK firmware
Good afternoon,
Prompt please, what it is necessary to change in the initial blheli.asm file that the controler understood PWM 480Hz frequency?
I have WASP nano cpx. On the tail engine there is a PWM signal frequency near 480-490Hz.
pca_int_check_1kHz:
; Check if pwm frequency is 1kHz
clr C
mov A, Temp1
subb A, #low (2200); If below 1100us, 1kHz pwm is assumed
mov A, Temp2
subb A, #high (2200)
jnc pca_int_restore_edge
clr A
setb ACC.RCP_PWM_FREQ_1KHZ
mov Temp4, A
mov Temp3, #120; Set period tolerance requirement (LSB)
pca_int_check_1kHz:
; Check if pwm frequency is 0,5kHz
clr C
mov A, Temp1
subb A, #low (4400); If below 2200us, 0,5kHz pwm is assumed
mov A, Temp2
subb A, #high (4400)
jnc pca_int_restore_edge
clr A
setb ACC.RCP_PWM_FREQ_1KHZ
mov Temp4, A
mov Temp3, #240;Set period tolerance requirement (LSB) (I INCREASED TWICE)
Рeriod tolerance has to be increased twice?
I am right? Or still something should be changed?
There is a problem with this RPM pull to H_King_20A that I coded. When multiple ESCs are chained together on a bus, their C2D pushpull outputs from P2.0 will clash. So the RPM mod as coded isn't so good. Perhaps P2.0 could be initialized as open drain with a weak pullup instead of pushpull. I did a fix in zobotek/BLHeli/H_King_20A and think it will work just fine, but I'm out of town for a week and can't test it yet. Here is the changed line:
;P2_PUSHPULL EQU (1 SHL DebugPin) ; P2.0 used to be set to pushpull
P2_PUSHPULL EQU (0 SHL DebugPin) ; P2.0 should be set to open drain (with weak pullup) to prevent clashes in multi config
While this solution fixes the clash in multi mode, it doesn't provide very usable RPM output in multi mode. Weak pullup clashes would waste a very small amount of power when the motor is turning in multi (daisy-chained C2D setups), but this is trivial compared to the motor current. Otherwise RPM might be a compile time or configurable option. Of course a different pin could be used, but there is some beauty in being able to use a single cable for multiple purposes. IMHO the above change to remove the clash is a good compromise. What are your thoughts, sskaug?
Thank you, sskaug, for the untold hours you have put into blheli, and for making it open source. I use it in wherever possible, in my quads and even in planes for the beacon, damping control and single programming interface across all my ESCs.
Alex
I understand there is not throttle calibration for PWM signal (only PPM)
I am feeding a XP-3A ESC a PWM signal. However at max throttle the PWM duty cycle is only 50%.
Thx
Hello,
I'm very new at flashing silabs, this is my second flash of the turnigy plush 30A, and both ended up smoking up (nfets) when full power was supplied from a 3S lipo. I have a 12V in between to cut down on the power and what I noticed on the second one (first one I connect directly, instant burn), is that the startup beep doesn't happen. There's a faint try at one beep but that's about it.
Flashing happens ok, without errors. I'm leaving the leads soldered onto the ESC, terminated in a 3-pin header to use with the toolstick.
I'll get a video made of the third one, so you can get an idea. If I burn this one, I will be down to my last 30A.
I was testing the damped light mode on my Sunrise BLHeli 30a esc since the manual says it supports damped light mode but when I connected my motor and repeatedly gave it some throttle bursts then the motor suddenly smoked (SUnnysky X3108S 720kv with 1355 t-type prop). I quickly remove the battery and unplug the motor I then connected the battery again and the esc quickly let magic smoke out (Motor is not connected). What could have happened here? The motor was not stuttering when I was testing it, throttle response was actually good but then the motor burned. Is it because I was using a 13inch prop?
BLHeli version: 13.1
Battery: 4s
Motor: SunnySky X3108S 720kv
Prop: Tarot T-Series 1355
ESC: Sunrise Slim BLHeli 30a

Hello,
I flashed BLHeli 13.1 on my Afro 12A Lite v3 ESC's (default settings so far) and using OpenPilot 15.01 I never had any issues. However in OpenPilot 15.02 they added support for OneShot125, and since I upgraded to OpenPilot 15.02 and enabled that option I'm sometimes having trouble getting all motors to start correctly. I posted about this on the OpenPilot forum and someone else confirmed the issue so I thought I'd open an issue for this on GitHub. See OpenPilot thread here: https://forums.openpilot.org/topic/55149-oneshot125-support/?p=412578
Short description of setup:
Issue description:
When I apply power to my quad, the quad plays it's initial startup beeps (a remote controlled beeper + battery beeper + ESC's etc). Sometimes (I'd say 2 out of 10 attempts) when this is done one or more ESC's make an additional beeping sequence. When I arm and then apply some throttle, one or more motor's then won't start at all. I've already tried recalibrating the ESC's and raising the minimum starting power in GCS. Sometimes when I disarm and wait for a while, the ESC's beep another time and usually I can then start additional or all motors. When all motors start correctly there is no issue flying and OneShot125 seems to work.
Steps to reproduce:
I've been unable to reliably reproduce this, it's always different combination of motors that show an issue. Ea. sometimes front left, sometimes all on the right, sometimes only rear.. It will work correctly 8 out of 10 times. I think this could perhaps be an issue with the protocol detection at ESC startup in combination with heat/timing unreliability? It seems to occur more often after a couple of flights.
Thanks for your time!
First thanks so much for creating this site and the BLHeli suite GUI! You have made life very easy for us.
We redesigned the MX-3A ESC using the C8051F85 chip (40% smaller, internal 1.65 V reference). We successfully used the GUI to reflash a stock MX-3A with the F330 and want to repeat the process with our custom F85 board (it is basically a copy of the MX-3A circuit but with the F85, an on-board 3V3 voltage regulator for the MCU, and TI's femtofets). I don't think the F85 requires the voltage divider reference since it has its own internal 1.65 V reference but in the first iteration I just copied the MX-3A circuit.
I know the F85 C51 register map is almost identical to that of the F330 except for a few differences. I wonder if it would be possible (and how?) to use the GUI to program our custom ESCs by making these changes. Can we modify and compile (using Simplicity Studio) the files on the github repository to create our own hex files to flash with the SL toolkit, or can we modify the GUI to respect the F85 variations using the MX-3A ESC configuration. Can you suggest a path forward for us?
Thanks for your help!
Kris
www.flynixie.com
Hello
I'd like to get a better grasp on the descriptor used for the fet switching speed
currently, i've seen:
switching speed is fast with a value (like <0.5us)
switching speed is not fast with a value (like 5us)
switching speed is slow
switching speed is quite slow
switching speed is quite fast
switching speed is somewhat fast
would it be possible to get an order like ?
quite slow
not fast
slow
somewhat fast
quite fast
fast
Thanks
Hi,
SuperMicro Systems 3.5A is apparently in end of life, replaced by the SuperMicro Systems - Brushless ESC - 3A Mi-3A. (http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=44697)
Anyone have tested Mi-3A with SuperMicro Systems 3.5A firmware ?
Thx
Hi,
How to compile BLHeli on GNU/Linux, because BLHeliSuit is for windows only ?
Thanks,
I've used four HK_UBEC_20A ESC on quad-copter with default settings (PWM Frequency = HIGH) with blheli 12.1 for a couple of months. Battery 4S, motor Turnigy Multistar 2216-800Kv 14Pole, 10x4.7 slowfly props. Performance was flawless, no issues even with fast change to full throttle.
Today I decided to improve performance by setting PWM Frequency to Damped Light and Damping Force to Highest, which according to official documentation is allowed on this ESC. I only changed settings on one ESC to see the difference.
At first test, using small 2S lipo and props on motors, everything worked, the braking was very evident. I was pleased and proceeded to connect 4S battery. The ESC all initialized normally then I gave it some throttle and heard a familiar pop. Before I realized what happened I tried to start motors for couple of times, every time the offending ESC would just move motor back and forth. I stopped testing.
Postmortem on ESC:
Then I did some more tests on another ESC (same as burnt one), this time using limited current source (bench power supply) and motor without prop. No matter what dampening force and motor timing was used the motor just didn't sound right (I even switched to blheli 12.2 after some tests). It was screeching and sounded very unhealthy. On the other hand if i choose PWM frequency HIGH or LOW the motor is butter smooth.
I have enough EE knowledge to do some measurements if you want, I have 2 channel 50MHz scope (could even use much better scope a work if needed).
Do you have any other setting recommendation I could try, or should Damped light mode for this type of ESC be removed from the docs and code?
Hi,
I have an issue with ESCs on a quad using those ESCs. It only occurred when using a 4S. Everything is fine and awesome on 3S. The only difference is that I have one Plush 40A on a old circuit board version (v6.1), new one are on (v6.21). They are all flashed with the Turnigy Plush 40A Multi Firmware.
I can't find information on internet to help me fix that problem. If its because of the old esc that can cause sync issue even if they all have the same pwm max and min, I will order a new one. Like I said, it is only happening on 4S batteries.
Thanks for the help!
Tim
I am using a Blue series 12a controller which used to run SImonK. I have since flashed with BLheli 13.2 and noticed that the power seemed lower than with the SK firmware. I did not do power measurements before upgrading but I do notice a max power difference with the PWM frequency on High vs when dampened light is activated. Is this normal? Maybe my hardware does not handle dampened light very well. I did some quick testing of the rpm of one motor with a 5x3 prop and fresh battery with the esc directly plugged into the Rx. Below is what I found:
DL on and timing medium, 21300 rpm
PWM High and timing medium, 21400 rpm
DL on and timing medium ,21,100 rpm
PWM High and timing medium, 21,400 rpm
DL on with timing high, 21,300 rpm
recharge battery
DL on with High timing 21,600 rpm
DL on and medium timing 21,300 rpm
What causes the power loss with DL on? I am running with high timing to make up the difference in power for now but I am not sure that is good for my motor. I really want to leverage DL to cure the yaw jump issues my quad has.
Any help is appreciated.
Hi.
I flashed my 4 emax 12A with blheli and set it up correctly, but it do not work.
The flashing process was ok. As well, the setting process.
When a put Naze32 (cleanflight) at normal mode, the esc star normal. But, when Naze32 set up oneshot125, the esc start singing (2 beeps per second continuously) and nothing more happens. I've tried to calibrate the esc with GCS, but ESC do not recognize calibration setup (if it is oneshot125 enable; if oneshot125 is disable, everything works fine, included calibration setup).
So, i would like to know if could some one help me.
Tanks
Hi,
I am interested in the Blheli firmware and I'd like to ask for your opinion on some ESC stuff. Would you mind sending me an email at: fabrizio.tappero at gmail.com
thanks a lot
Fabrizio
PS I tried to find your contact over the internet but no luck
Hi, I have BLHeli on Turnigy Plush 25As. Most of the time they work fine but after a few months they seem to switch on, the start up tune is MUCH louder, and the motors smoke. I then have to replace the ESC+Motor.
So far, I've been through four sets of ESCs and motors and am now slowly reverting back to stock turnigy plush (if you have the flash image for this please let me know).
They're being used on an ardupilot quadcopter with 2217-20 Turnigy motors.
Willing to offer any help I can to find this bug.
Best
Gareth
Hello,
I use BLheli 13.2 and have a problem with 3D mode (Quadropter with NanoWii). When changing the direction of rotation one motor fails. It is not always the same motor. The problem does not occur so often with a 3S Lipo battery. But with a 4S battery the problem is very big.
When I disarm and arm the copter (after a motor fail) the ESC beeps. After that everthing works fine. It looks like a signal failure betwen ESC and flightcontrol.
I have tested the following:
ESC: 4x Hobbywing 20A
Flightcontrol: Flyduino NanoWii
Motors: T-Motor 2204
Propeller: Graupner 3D 6x3"
Greetings
Fabian
Because the ESCs with Silabs processor do mainly use the internal resonator with +-2% tolerance, the adjusted PPM center throttle position (motor off or neutral position) is not very accurate and it also moves, because of temperature drift. So after a flight it can happen, that a motor doesn't stop running any more and it's still runs slowly.
The easeast way to solve this problem would be to increase the dead zone (use a wider neutral zone) to the adjusted neutral position +-20µs or if you don't like a fixed wider neutral position the width of the neutral position could be also adjustable. At least +-10µs should be applied.
Could you do this with the next update, please?
Reported and confirmed in the rcgroups thread.
Motors arm but don't spin.
Is the Afro 20A Opto 2-6S supported by blheli?
Thanks
I want to use NCP3420(MOSFET Driver datasheet http://www.onsemi.cn/pub_link/Collateral/NCP3420-D.PDF) is suitable for the synchronous rectifier technology。(Because it can improve the efficiency)。I have modified the PORT 1 definitions,MACRO AnFET_on,AnFET_off,BnFET_on......All_pFETs_Off,etc。But the motor twitches。Do you have any solutions?
Thank you very much
Duan.China
Hi
For converting my quadro-copter into a Hexa-copter I ordered two Emax Budget 18A.
https://lh4.googleusercontent.com/-yBPbRTj44XA/U2Pu3lj-HLI/AAAAAAAAW3Y/nZ4yslhppmc/s800/DSCF8139.JPG
https://lh5.googleusercontent.com/-M45-bYoH47o/U2Pu2Lr1OhI/AAAAAAAAW3Q/et9w8GzDQ70/s800/DSCF8140.JPG
I thought I did used them for the existing four ESCs and flashed them with BLHeli.
After they were delivered und I had removed the shrink foil,
I figured that I remembered wrong, and the Emax Budget 18a is not supported by BLHeli.
(The existing ones where FlyFun 18A).
But the good thing is, the Emax Budget 18A is based in the F330 SiLabs chip,
so BLHeli could be adopted to that ESC.
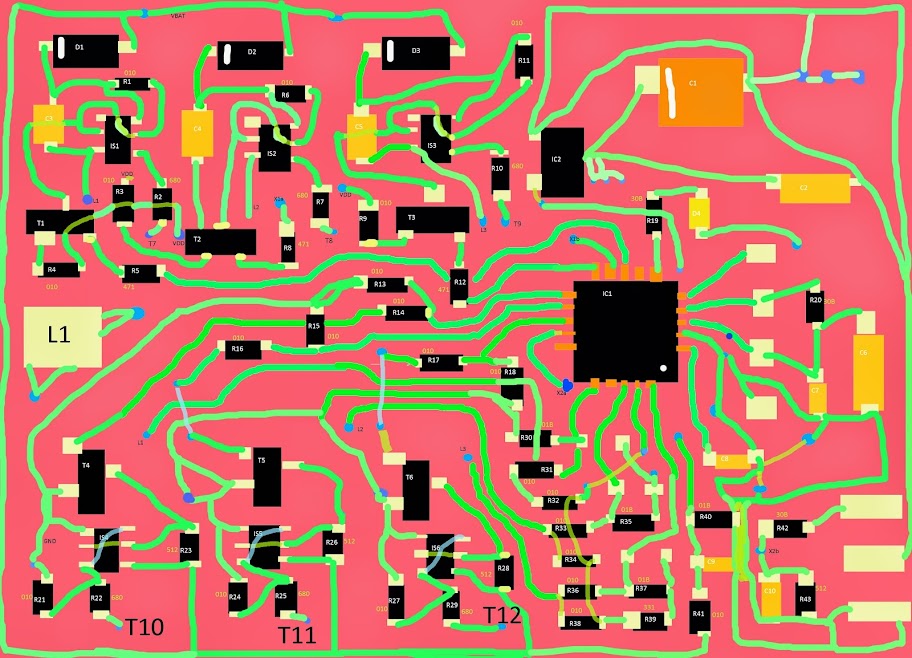
With that in Mind, I started to analyses the layout of the Budget 18A.
Here is the CPU pin assignment I found.
P0 P1
7 PPM 7 LED
6 ADC 6 NC
5 FbA 5 HfetA
4 4 HfetB
3 FbB 3 HfetC
2 SUM 2 LFetA
1 FbC 1 LferB
0 Reset? 0 LfetC
That looks like the Aeolian XP 18A. So I flashed that file for testing.
But I does not work, you can hear the startup beeps with not Motor attached.
That is definitely not good.
So I went into a more deep analysis of the circuit and created a schematic (at least the part of the power driver).
No it was clear, why the file for the XP-18A did not work.
While the XP-18A is using an inverting Driver for the High side FETs,
the Budget 18A is using non-inverting FET driver for low and high side.
That is the case on for the xp-35a-sw as well.
So I tried that file. That one does work on the Emax Budget 18A.
So now I do have a good starting point, but now I struggle:
How to determine proper values for P/N FETON_DELAY, COMP_PWM_HIGH/LOW_ON/OFF_DELAY?
I do have a 2 channel Scope, so I can do some measurements,
but I have no idea what measurement setup I shall use, and what I shall expect to see or to look for.
Can you give me a hint, how to determine these values?
Or is there some literature you can suggest, to get more comfortable with that?
Or can you suggest some save values, that I can use (not having perfect performance) but a working ESC?
Best Regards Ralf Brandt
Hello! Please, help my to configure your firmware for HobbyKing RedBrick 50A based on ATmega48V.
=== BOM ===
1x ATmega48v
3x IR2101
12x P0603BD N-Channel MOSFET
=== Defenitions ===
H = IR2102 PIN 2 (!HIN)
L = IR2102 PIN 3 (!LIN)
S = from phase wire over 47k+(47k to fround)
=== RC transmitter PWM INPUT ===
PD2 over 4.7k
=== CMP COMMON ===
PD6
from a/b/c phase wire over 3x47k+(3x47k to ground)+3x47k
=== PHASE A ===
H - PD0
L - PD1
S - PC2
=== PHASE B ===
H - PD4
L - PD3
S - PC3
=== PHASE C ===
H - PD5
L - PD7
S - PC4

Hi,
Thank you for your great work !
I need to control a brushless motor without remote control so that it reaches its maximum speed (or specific speed) immediately after power up (without delay and without startup protection).
I try to modify code (SiLabs with SuperMicro and XP 3A), i don't have problem to remove the delay at start up but i'm not familiar with this instructions set so I find it hard to understand all the code...
Can you give me a little help so that the engine running at a specific speed at startup without remote control.
Thank you very much !
Good afternoon,
Prompt please, what it is necessary to change in the initial blheli.asm file that the controler understood PWM 480Hz frequency?
I have WASP nano cpx. On the tail engine there is a PWM signal frequency near 480Hz.
pca_int_check_1kHz:
; Check if pwm frequency is 1kHz
clr C
mov A, Temp1
subb A, #low (2200); If below 1100us, 1kHz pwm is assumed
mov A, Temp2
subb A, #high (2200)
jnc pca_int_restore_edge
clr A
setb ACC.RCP_PWM_FREQ_1KHZ
mov Temp4, A
mov Temp3, #120; Set period tolerance requirement (LSB)
pca_int_check_1kHz:
; Check if pwm frequency is 0,5kHz
clr C
mov A, Temp1
subb A, #low (4400); If below 2200us, 0,5kHz pwm is assumed
mov A, Temp2
subb A, #high (4400)
jnc pca_int_restore_edge
clr A
setb ACC.RCP_PWM_FREQ_1KHZ
mov Temp4, A
mov Temp3, #240;Set period tolerance requirement (LSB) (I INCREASED TWICE)
Рeriod tolerance has to be increased twice?
I am right? Or still something should be changed?
Hi I'm trying to build a brushless gimbal and I'm trying to come up with a way to control a Quanum 2208 gimbal motor bidirectionally. I've managed to flash a turnigy plush 6a with the multirotor version of BLHeli and I've set the motor direction to bidirectional. I am able to control it using a pwm signal but when the motor is stopped there is a 1-2 second spool up time where the motor slowly accelerates and has almost no torque, after which it runs fine until it comes to a stop. I've played with the various settings but can't seem to improve it much. I'm hoping to be able to quickly switch the speed and direction of the gimbal motor. Is this even possible with BLHeli? Thanks!
Hi,
I was trying to get the latest blheli suite from https://www.mediafire.com/folder/dx6kfaasyo24l/BLHeliSuite, but I see no files inside this shared link (screen capture attached). Is it down? Can you provide an URL from a different host? Thanks.

As i have already written in the rcgroups thread i want to test OneShot input signal with higher update rates.
The problem is that input signals with a frequency of 1kHz or above gets detected as 0-100% PWM.
To use a high control rate in the FlightController and also a high frequency of the ESC signal, i tried to activate the OneShot mode (which syncs the ESC output to the control loop) but instead of using the 125-250µS Oneshout pulses, i used 0-80% PWM signals corresponding to the control loop rate (together with a Motor Gain of 1.25) .
For the 1kHz setup it seems to work. The ESC arms with this signal and reacts to the throttle.
For the 2kHz setup it doesn't arm. When armed with a normal 2kHz PWM, and after that switched to OneShot mode the ESC reacts to the throttle.
The arming problem maybe is caused by a jitter in the frequency of the OneShot signal.
As some FC software like Openpilot or Taulabs don't use an internal timer for the timing of the control loop but triggers them by an gyro interrupt.
I am using Taulabs and looked at the ESC signal with a logic analyzer.
Most times the frequency is constant, but sometimes for 1 or 2 pulses there is a change in the frequency which is sometimes so large, that BLHeli might detect it as a different PWM frequency.
This might be the problem with the arming.
And when BLHeli detects the frequency not only at the arming for the correct 0-100% scaling, but also during normal work, additional problems could also happen during normal operation/flight, as the pulse width stays the same, only the frequency changes for 1 or 2 pulses.
Are there features planed for the next versions of BLHeli to support OneShot with higher update rates?
A selection between auto detection of the signal type, or one of the fixed input types (PPM, OneShot125, 1kHz PWM, 2kHz PWM, 4kHz PWM, 8kHz PWM, and 12kHz PWM) would offer high degree of freedom for advanced users.
Additionally a higher resolution of the sampled input signal would be nice. I don't know if this could be possible with just using a higher clock on the used timer module, and a rescaling of the values.
Hi there,
i just got four Polaris Thunder 20A ESC's which are based on SiLabs chipset:
http://www.goodluckbuy.com/polaris-thunder-20a-l-4s-esc-with-3a-bec-for-brushless-motor.html
It seems that they are not supported yet, so i would like to ask if it is possible to support them in BLHeli.
If you need any more info or pictures i would try my best to support you.
Hello!
Do you plan to do the firmware for RCT 6A Silabs MPU based ESC?
http://www.rctimer.com/index.php?gOo=goods_details.dwt&goodsid=456&productname=
Really looking forward
Thank you.
Hi! Today I flashed my ESCs with BLHELI 14.
After calibration and cc3d reconfiguration I came to flying and got a crash.
When flying, when I set zero throttle and increased it back my quad flipped forward and crashed.
I tried again and got a crash again.
I developed what happened. After getting zero throttle and increasing throttle back motors start at different time.
What I doing wrong? Is my ESC incompatible with v14? If so, please be aware.
Hi Steffen.
After a reset to defaults via Tx the parameters P gain, I gain, governor mode, beep strength and beacon delay have an incorrect default values (7, 7, 1, 120 and 4 instead of 9, 9, 4, 40 and 4 respectively).
This is because "set_default_parameters" routine in BlHeli.asm have a "mov @temp1, #DEFAULT_PGM_MAIN_GOVERNOR_MODE" instead of "mov @temp1, #DEFAULT_PGM_MULTI_GOVERNOR_MODE" etc. (line 5027 in BlHeli.asm for example)
Please fix this in future releases.
Today I had some weird occurrences with my Cobra 2204/1960kv and Ubad 20A ESC's. With BLHeli 13.2, it was no problem to run 6x4.5 props and 4S. Today, after flashing this morning before flying to BLHeli 14, I started having problems. Startup and run through 3/4 throttle, it would run great, push it to full throttle and the motors would drop out and the quad would fall out of the sky. Running it on 3 or 4S and 5x4.5 props, it was flying great. After talking with one of my local pilots, he was having great luck, until he ran 6" props. Attached is my screenshot from BLHeli Suite.

Hi, I have some Atmel-based ESCs that I'd like to flash with BLHeli but I can't match them to any of the images in the BLHeli supported Atmel ESCs.pdf
Does anyone recognize this PCB and/or can someone please tell me which pads to use for programming with a BLHeli Box? I've tried contacting Ready To Fly Quads but their support is nonexistent — they never answer their emails.
Thanks!

is it possible to have power leds, and sync leds on afro escs i find this really useful, when powering as a sure way that escs are powered and for spotting sync issues....?
thanks Al....
Hi there,
I have trouble with my Hobbyking UBEC 10A ESCs connected to a NAZA-M V2:
Firmware 13.2 and PPM min/max are set to 1000µs/2000µs. ESCs do not initialize, I suppose that is caused by the NAZA sending 940µs PPM signal only, when not armed.
To intitialize the ESCs, I have to unplug them from the FC shortly and re-connect them after they make the beep-sound. Afterwards I can start the motors.
Hi BLHeLi team,
First of all, I want to say thanks.
You guys created a wonderful firmware for ESC.
It is really helpful for everyone who wants to customize their own ESC.
My questions are
(1) After reading your document, I am curious to know why the bi-directional control requires PPM signal instead of PWM signal? Is there any specific reason for that?
(2) Have you considered to implement I2C or UART communication in the near future?
Thanks.
Hello!
I have a Turnigy Plush 60A ESCs that i want to flash with your excellent firmware.
Should i use a firmware for 30A variant, is it any different?
Or maybe i could help somehow to build a version for my ESCs?
I can send photos and do some tests and measurements if that's needed.
Thank you.
Hello dev team,
I follow your indications for upgrade blheli firmware on this esc, including bridging 2 pin on mcu as showed on supported silabs esc, and result is that esc can't startup.
Currious behaviour is that when I activate startup method stepped, esc start to rotate but fail after 1-2 seconds.
I'm using t motor 44 poles U10 12S motor.
I also test this motor on 6S with blheli rctimer 40A work well, but I need 12S power.
Thanks in advance for your help.
Regards.
I got a problem with Multistar 30A V2 ESC´s i am not be able to get it into throttle calibration mode.
It seems to be an issue with the signal from the Hitec Optima receivers, i read that other user are having the same issues.
An rcgroups user points out that has to do with the folling changes after updating from version12.2.
Avoiding detection of 1-wire programming signal as valid throttle signal
The oldest Firmware for those ESC´s is 13.1.
Is there an update comming to solve this issue or how do i use these ESC´s with the optima receiver?
Best regards
Hello,
I don't know if this thread can stay here or I should ask in another place. If so, tell me ^_^
First of all, thanks a lot Steffen@sskaug for your MASSIVE work.
I want to use brushless motors for a line follower, but I imagine that my requirements are the same for any kind of precision motor control, not just for my robot.
I want to use the SN20A ESC with the motor http://www.hobbyking.com/hobbyking/store/__9069__Turnigy_1230_Brushless_Inrunner_Motor_4500kv.html
I think this ESC has power enough to deal with this motor.
BLHeli should be able to manage this motor??
Also, no dead-zone should be better. The SN20A has a crystal, so I think no dead-zone will increase the precision. Exist the possibility of disabling this feature?
Speaking of features... BLHeli has somehow a brake... This brake differs from the esc-car brake? (if I change the signal from 80% to 20%... I want the change as fast as possible).
I was reading this thread (#55), and be able to update the esc at 2 o 4KHz sounds perfect!! When is predicted to be available to the SN20A ESC??
Which is the precision for a normal signal?? (steps in OneShoot125, for example).
In which circumstances the esc will disarm?? In some scenarios maybe I don't want this feature...
I have several arduinos, so I don't mind test codes ^_^, also, install avrstudio and try to make some changes, it doesn't mind me, but I'm not very good in asm...
Hi,
I try blheli on emax 12A simon series and i have problem with start motor (BE1806-2300kv). Before start motor, motor twitches. Please look at this video https://youtu.be/-WeUbMGoha4 ESC 2 is powered by simonk FW, and esc 4 is powered by lattest (13.2) BLheli firmware.
I tried change timing from low to hard. When i set hard timing, it is better but not good. I tried change PWM frequency/dumped, demag compensation, closed loop mode, motor gain, startup power, but no efect.
This is my last settings http://postimg.org/image/l3xz637yj/ same setting have ESC on video.
Configuration:
ESC: emax simon series 12A
Motors: DYS-BE1806-2300KV-Brushless-Motor
Controller: naze32 (openshot125 OFF)
Battery: 3S
Thank you very much
Petr Cada
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}