arduino-libraries / madgwickahrs Goto Github PK
View Code? Open in Web Editor NEWArduino implementation of the MadgwickAHRS algorithm
Arduino implementation of the MadgwickAHRS algorithm
Besides YPR the quaternions are useful to calculate dynamic acceleration as well as other coordinate transformations. I recommend a getQ function be added to the filter files. In MadgwickAHRS.cpp you could add:
void Madgwick::getQ(float * q) {
q[0] = q0;
q[1] = q1;
q[2] = q2;
q[3] = q3;
}
while in MadgwickAHRS.h under public functions:
void getQ(float * q);
In the visualizer sketch you would need to add:
float q[4];
and obviously to call the new function:
filter.getQ(*q);
R.
Mike
In the desktop IDE I get a couple of "warnings" but in the ONLINE editor CREATE I get a compilation failure with the following output.
/home/admin/builder/arduino-builder/latest/Madgwick-1.2.0/src/MadgwickAHRS.cpp: In static member function ‘static float Madgwick::invSqrt(float)’:
/home/admin/builder/arduino-builder/latest/Madgwick-1.2.0/src/MadgwickAHRS.cpp:234:20: warning: dereferencing type-punned pointer will break strict-aliasing rules [-Wstrict-aliasing]
long i = *(long*)&y;
^
/home/admin/builder/arduino-builder/latest/Madgwick-1.2.0/src/MadgwickAHRS.cpp:236:16: warning: dereferencing type-punned pointer will break strict-aliasing rules [-Wstrict-aliasing]
y = *(float*)&i;
^
Hello!
Whenever I use the code you provided, I get the following two errors:
When using randomly chosen Quaternions, the filter won't be able to calculate the expected euler angles and give me the error that the argument in a trigonometric function (sin, cos etc.) is wrong.
When the filter runs without an error, the euler angles I read with the getRoll etc. methods are completely wrong and when I rotate my sensor 360° around one axis, the corresponding euler angle changes only in around 50-60°
I update the filter with a frequency of 512 Hz, changed my beta to values between 1 and 0.1 and the gyroscope values are in degrees per second. Do you know a solution or what possibly might be my problem?
Kind Regards,
Robert
As you raised a issue here arduino/ArduinoCore-arc32#151
and you have corrected the issue using a matrix i.e
float c1 = cos(radians(roll));
float s1 = sin(radians(roll));
float c2 = cos(radians(pitch));
float s2 = sin(radians(pitch));
float c3 = cos(radians(yaw));
float s3 = sin(radians(yaw));
applyMatrix( c2_c3, s1_s3+c1_c3_s2, c3_s1_s2-c1_s3, 0,
-s2, c1_c2, c2_s1, 0,
c2_s3, c1_s2_s3-c3_s1, c1_c3+s1_s2_s3, 0,
0, 0, 0, 1);
Can you please explain the following matrix in terms simple
rotateY , rotateX, rotateZ functions
Did you also change anything in madgwick libraries ?
please help me to understand the basis of the changes.
Hi,
Thanks
A pull request has been done so that the quaternion form can be returned. Could you please accept the pull request? Thanks.
A small change in the actual object's (say board) orientation (Yaw) is changing both the Yaw and Roll values given by the library by a lot. But, the visualizer is showing the orientation changes correctly.
When I changed just the Yaw of the board by approximately 10 degrees, the values returned by the library changed from 258.55 -76.74 -78.69 to 107.18 -83.89 82.95.
Don't the Yaw, Pitch, Roll values returned by the library represent the rotations about axes ?
Why can't we use the Yaw, Pitch, Roll values directly to rotate the 3D object (Instead of applying matrix transformations) ?
The yaw pitch and roll values returned by computeAngles is incorrect.
for example, using q = [0.5000 0 0.7071 -0.5000], the compute angles would return yaw: -90, pitch: 45, roll: -90 when the correct values are yaw: 90, pitch: 45, roll: -90. This problem only arises in certain quadrants.
It is a little hard to visualize these rotations, but I trust the implementation here: https://quaternions.online/
it is my go-to comparison for testing.
A correct implementation can be found on the wikipedia page for this conversion (https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles)
Hi all
I have been using these filters for the last couple of years and there are a couple of things that I am confused about with Curie implementation.
You have the sample frequency set to 512hz but all the implementations that I have seen and what I use is that the sample frequency is calculated with the main (sketch) and passed to the filter. The second is that I would recommend that betaDef be set within the sketch to allow the user to tune the filter.
The last is that there is an error in the source code that is on Seb Madwick website in the "c" file. Here is the reference: http://diydrones.com/forum/topics/madgwick-imu-ahrs-and-fast-inverse-square-root?commentId=705844%3AComment%3A1755084
The last thing is that gx, gy, gz should be radians/second and the way the sample is implemented it is passing these values in degrees per second - I am assuming I am reading the BMI160 data sheet and BMI160.ccp correctly.
The reason I bring this up is because if I make these changes I wind up with quite a bit of drift.
I can do a push for the changes to the library if you would like.
Thanks for your help
Mike
I m now working on heading estimation and trying to use madgwick algo in ur project processing cell phone's acceleration ,magnetometer and gyroscope data to get heading information. I tried inputing raw data into update() function and the result of ypr angle seems pretty strange. I m not sure if i use the
ax = convertRawAcceleration(aix); ay = convertRawAcceleration(aiy); az = convertRawAcceleration(aiz); gx = convertRawGyro(gix); gy = convertRawGyro(giy); gz = convertRawGyro(giz); code after getting my raw data, and i also wanna know how to transfer the ypr angle result to pedestrian‘s heading.
MadgwickAHRS/src/MadgwickAHRS.cpp
Lines 237 to 238 in 7b6a635
error................................
Below are the orientation values from the Madgwick AHRS filter, and "h2", which is my value "heading2" as calculated from the magnetometer:
heading2 = 180 * atan2(my, -mx)/M_PI;
my, mx, and mz have all been "padded" with a constant to calibrate for hard-iron effects. This has led to good results in the visualizer, and good results from heading2, so I trust that part. mx is fed to the AHRS filter negated since I am using a LSM9DS1 and the magnetometer's x axis is backwards to the gyro and accelerometer's x axes.
If you notice below, heading2 is ~20 degrees different from the AHRS calculated heading. This appears to stay rather constant thoughout 360 degree rotation, plus or minus 3 or 4 degrees maybe, and that small variance may just be noise or lack of tilt compensation in hading2 and an unsteady hand.
Orientation: -18.89 h2: 1.70 4.94 0.35 loopT: 20
Orientation: -18.89 h2: 0.17 4.93 0.35 loopT: 20
Orientation: -18.89 h2: 1.36 4.93 0.33 loopT: 20
Orientation: -18.89 h2: 0.35 4.93 0.30 loopT: 20
Orientation: -18.90 h2: 0.17 4.93 0.28 loopT: 20
Orientation: -18.89 h2: 0.17 4.93 0.28 loopT: 20
Orientation: -18.89 h2: 1.05 4.93 0.28 loopT: 20
The odd thing is that h2 appears correct as compared to "compass galaxy" (an android app) and google maps. heading2 shows 0 when pointed toward magnetic north. I found this out after observing that the Madgwick results were about 20 degrees off and flying my plane about 20 degrees off into a tree a few days ago. And its always about the same every time I boot up. The tilt readings look great, the pitch readings look great, but the yaw values are always about 20 degrees too far negative, counterclockwise.
I can attach my full code if that interests anyone but its kindof a big sloppy mess at the moment. Please, if anyone has any ideas let me know. Until then, I will be writing a function to pad the Madgwick values, and the pad will be calculated from:
heading2 - heading
when tilt ~=0.
Any help is appreciated,
-Aaron
Hello, all! I've been trying to implement this filter for the last few days with troublesome results. I know this filter works, given the work by @PaulStoffregen and others who show it working well.
I have convinced myself that there must be something wrong with the scale and/or coordinate system input I'm giving the filter, as the readings from my IMU seem to be correct and stable. If this turns out to be the case, I'll be happy to put in the work to add comments or wiki pages describing the fix.
update() call)Here is a printout of the raw readings from my IMU given in x, y, z while sitting on a table:
A: 0.02,-0.02,0.03
G: -0.02,0.03,0.07
M: -0.01,0.04,-0.36
A: 0.02,-0.02,0.02
G: 0.19,0.20,-0.07
M: -0.02,0.04,-0.37
A: 0.03,-0.02,0.01
G: 0.03,0.20,-0.10
M: -0.02,0.04,-0.36
A: 0.02,-0.02,0.03
G: -0.06,0.27,-0.03
M: -0.02,0.04,-0.36
A: 0.01,-0.01,0.03
G: 0.01,0.34,0.18
And here are the values from the filter (the code looks very much like the example included in this repo):
219.,-31.51
219.74,-36.38,-30.93
219.58,-36.56,-30.66
219.71,-36.74,-30.88
219.89,-36.54,-31.17
180.00,-0.36,-0.28
179.99,-0.75,-0.53
180.00,-1.11,-0.80
180.00,-1.42,-1.13
180.01,-1.80,-1.37
180.03,-2.17,-1.64
180.04,-2.54,-1.90
180.05,-2.88,-2.20
180.06,-3.25,-2.46
180.08,-3.62,-2.73
180.09,-4.01,-2.96
180.11,-4.35,-3.25
180.14,-4.69,-3.54
180.16,-5.08,-3.78
180.18,-5.50,-3.96
180.20,-5.89,-4.19
180.22,-6.26,-4.46
180.27,-6.58,-4.76
180.27,-7.03,-4.75
180.31,-7.41,-5.00
180.36,-7.78,-5.27
180.40,-8.13,-5.55
180.46,-8.53,-5.76
180.50,-8.91,-5.98
180.57,-9.26,-6.29
180.63,-9.62,-6.55
180.69,-9.96,-6.83
180.74,-10.33,-7.07
180.78,-10.71,-7.30
180.79,-11.15,-7.26
180.86,-11.49,-7.55
180.94,-11.83,-7.84
180.99,-12.22,-8.04
181.06,-12.53,-8.35
181.12,-12.92,-8.56
181.21,-13.29,-8.81
181.26,-13.67,-9.01
181.35,-14.03,-9.27
181.42,-14.42,-9.46
181.51,-14.78,-9.70
181.60,-15.11,-9.98
181.69,-15.49,-10.21
181.78,-15.86,-10.43
181.88,-16.22,-10.68
181.98,-16.55,-10.95
182.07,-16.93,-11.16
182.17,-17.28,-11.41
182.27,-17.64,-11.63
182.37,-18.02,-11.84
182.50,-18.38,-12.08
182.61,-18.75,-12.31
182.76,-19.05,-12.63
182.89,-19.38,-12.90
183.01,-19.72,-13.16
183.15,-20.03,-13.45
183.25,-20.41,-13.61
# ... A linear growth continues
213.06,-37.41,-30.32
213.31,-37.53,-30.66
213.55,-37.66,-30.96
213.67,-37.58,-30.89
213.66,-37.86,-30.77
213.94,-37.53,-31.05
214.24,-37.47,-31.44
214.44,-37.11,-31.58
214.21,-37.18,-31.03
214.02,-37.39,-30.57
214.19,-36.98,-30.69
214.45,-36.87,-30.92
214.65,-37.01,-31.14
214.73,-37.23,-31.13
214.81,-37.05,-31.04
214.98,-37.12,-31.13
215.06,-37.33,-31.13
215.27,-37.43,-31.33
215.51,-37.56,-31.62
215.62,-37.67,-31.67
215.80,-37.68,-31.78
215.95,-37.77,-31.90
216.23,-37.47,-32.29
216.46,-37.55,-32.57
216.67,-37.68,-32.85
216.70,-37.78,-32.66
216.51,-37.51,-32.22
216.60,-37.71,-32.21
216.46,-37.47,-31.79
216.71,-37.56,-32.10
216.99,-37.50,-32.44
217.14,-37.17,-32.50
216.90,-37.29,-32.00
216.61,-37.27,-31.43
216.67,-37.43,-31.40
216.79,-37.21,-31.46
216.81,-37.46,-31.42
216.85,-37.32,-31.30
217.02,-37.34,-31.46
217.18,-37.27,-31.59
217.31,-37.39,-31.72
217.15,-37.22,-31.30
216.93,-36.94,-30.86
216.97,-36.48,-30.93
217.25,-36.57,-31.36
As mentioned, this is with the IMU laying flat on the table.
This filter is pretty straight-forward in implementation, so I can really only see two areas where things can be going wrong: The coordinate system and the scaling.
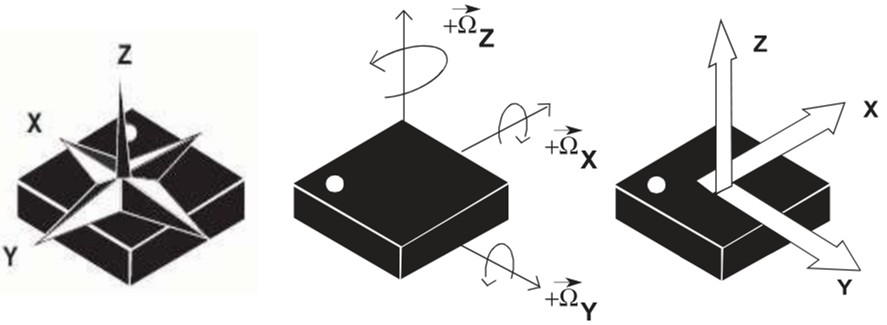
The coordinate system for my IMU is a bit wonky, so I normalized it to a right-handed coordinate system. Here is the coordinate system out of the box:
(Note the polarity marker is rotated for the mag diagram)
Here is my normalization and scaling code (and the filter call):
imu.readGyro();
imu.readAccel();
imu.readMag();
float gx, gy, gz, ax, ay, az, mx, my, mz;
// Use a right-handed coordinate system
gx = imu.calcGyro(imu.gy);
gy = imu.calcGyro(imu.gx);
gz = imu.calcGyro(imu.gz);
ax = imu.calcAccel(imu.ay);
ay = imu.calcAccel(imu.ax);
az = imu.calcAccel(imu.az);
mx = imu.calcMag(imu.my);
my = -imu.calcMag(imu.mx);
mz = imu.calcMag(imu.mz);
// update the filter, which computes orientation
filter.update(gx, gy, gz, ax, ay, az, mx, my, mz);
// print the heading, pitch and roll
roll = filter.getRoll();
pitch = filter.getPitch();
yaw = filter.getYaw();
// Print values hereThe calcX calls are part of the IMU library, described in short:
calcAccel(), calcGyro(), and calcMag()
The library keeps track of each sensor’s scale, and it implements these helper functions to make translating between the raw ADC readings of the sensor to actual units easy.
calcAccel(), calcGyro(), and calcMag() all take a single parameter – a signed 16-bit integer – and convert to their respective units. They all return a float value, which you can do with as you please.
I tried to keep this short, and I appreciate any time anyone can spend on it. I'm also including the full sketch for context if needed.
When I implemented this on my machine I had major instabilities when I used a real IMU. After some research it looks like there are some problems with this implementation of the invSqrt function. Fixed when I replaced it with this one:
https://diydrones.com/forum/topics/madgwick-imu-ahrs-and-fast-inverse-square-root
I noticed a minor issue in the visualizer example : the pitch and yaw angles are reversed.
When i rotate the board in one direction along one of these axes, the visualization rotate in the opposite direction.
Hi,
I'm using a MPU9255 with an ESP12. Currently I'm able to use this filter, obtaining good results with the following input data:
filter.update(gx*RAD_TO_DEG, gy*RAD_TO_DEG, gz*RAD_TO_DEG, ax, ay, az, mx, my, mz);
The problem is that, in this way, I get the equivalent of an aeroplane reference system, with z axis pointing down.
Following the axis scheme of the MPU9255 and deciding to set y axis to North, I've changed the previous call with the following one using the NED reference system:
filter.update(gy*RAD_TO_DEG, gx*RAD_TO_DEG, -gz*RAD_TO_DEG, ay, ax, -az, mx, my, mz);
In this way, the sensor is giving good values with correct Roll and Pitch data.
The problem is that, whenever I start tilting the sensor (ie. incrementing Pitch), the Yaw also changes a lot, and it takes a very long time (tens of seconds) to get back in the right "pose", making the sensor useless. Any idea of why this happens? It doesn't happen with the first call reported above, which works perfectly.
Gyroscope and magnetometer have been calibrated, obtaining the results depicted in the following image (mag).

I also noticed that, whenever I rotate the sensor on a flat surface, the yaw is not the only value varying, but also roll/pitch. Is this normal?
Gyro and acc are running at 200Hz, mag (AK8963) at 100Hz and I've passed 200Hz to filter.begin() (I tried also with 25, 100 and 1000 values, getting equivalent results). Tried with Mahony filter, and a second IMU unit (Waveshare IMU 10DOF V2-C ), but got the same results! Data from MPU is retrieved using Bolderflight library.
Thank you.
I am developing a prototype attitude indicator.
I use a board LSM6DS3 as accel + gyro sensors + STM32 as microcontroller for mathematics and ESP32 for graphics generation.
I do not enter the values of the magnetometer axes, and according to the library code
MadgwickAHRS/src/MadgwickAHRS.cpp
Line 56 in e590573
mx = 0, my = 0, mz = 0 the filter will only take the value of accelerations and angular velocities of the gyroscope.

#define sampleFreqDef 512.0f // sample frequency in Hz
#define betaDef 0.1f // 2 * proportional gain
MadgwickAHRS/src/MadgwickAHRS.cpp
Line 28 in e590573
I dont know what causes this issue.I use the acc sensor and gyro sensor.The acc is measured with normal gravity g and gyro is rad so I annotate the code "*0.017" in updateIMU that converts the gyro into rad.
Hello, thanks for making Madgwick filter so easily available on Arduinos!
Are you aware of the analysis in https://github.com/RideBeeline/madgwick-investigation?
It reveals that the code here is missing two multiplications by two. What is called two bx and two bz here is in fact bx and bz.
It can be fixed by, for example, adding these two lines.
After reading the original paper (pdf) and a Python implementation, I support the conclusion of the analysis.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.