uzh-rpg / rpg_svo_example Goto Github PK
View Code? Open in Web Editor NEWExample node to use the SVO Installation.
Example node to use the SVO Installation.
Hello,
I am trying to get the REMODE to work with svo 2 binaries and already made the REMODE publish colored pointcloud, but the svo_2 dense input only publishes the mono8 image.
In the Visualizer.cpp line 656 the if condition (" !frame->original_color_image_.empty()" ) is always false - the original frame is empty, as far as I understand the original colored image is not being passed. How to set it to true? Can you recompile the binaries with this variable to be true?
I first had some libraries missing when building and I was able to solve that by following the solution suggested here #23.
Now when I try to run the example mentioned in the end of the installation instructions, I get the following error:
/home/Codes/visual_odometry/SVO2/svo_install_overlay_ws/devel/lib/svo_ros/svo_node: symbol lookup error: /home/Codes/visual_odometry/SVO2/svo_install_ws/install/lib/libglog.so.0: undefined symbol: ZN6google14FlagRegistererC1INSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEEEEPKcS9_S9_PT_SB
So it seems like that this this symbol is undefined in the libglog.so.0 and I confirmed that by running:
nm libglog.so.0 | grep ZN6google14FlagRegistererC1INSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEEEEPKcS9_S9_PT_SB_
ldd libglog.so.0 gives the following output:
linux-vdso.so.1 => (0x00007fffba97a000)
libpthread.so.0 => /lib/x86_64-linux-gnu/libpthread.so.0 (0x00007f18f52a4000)
libgflags.so.2.2 => /usr/local/lib/libgflags.so.2.2 (0x00007f18f506d000)
libstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f18f4ceb000)
libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f18f4ad5000)
libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f18f470b000)
/lib64/ld-linux-x86-64.so.2 (0x00007f18f56fe000)
libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f18f4402000)
I don't know at the moment how to solve this issue, so if someone has faced the same problem and has a solution or some tips to point me to the right direction, that would be greatly appreciated. Thank you. If there is some more information needed, I can provide that.
Hi Zichao,
we are implementing the active exposure control algorithm proposed in your ICRA17 paper. To evaluate the exposure control method, the feature track distribution diagram as in Fig. 10 of your paper seems to us a revealing tool. To prepare data for the diagram, we are looking to record ros messages of feature tracks with the svo2 package kindly provided by you. As we look through the svo2 package, the closest clue we find is function publishBundleFeatureTracks which plots the point features matched between two back-to-back frames onto the current frame bundle. Other than that, we don't see functions or message types that are relevant to publishing feature tracks in terms of ros messages. So we wonder,
is it possible to export feature tracks from svo2 package?
If not, can you please advise on alternatives with which the feature track data can be obtained?
During following "install.pdf",
roslaunch svo_ros run_from_topic.launch cam_name:=svo_test_pinhole
rosbag play svo_test_short.bag
Executing first line of above commands shows me messages below ..
NODES
/
svo (svo_ros/svo_node)
svo_gui (rqt_gui/rqt_gui)
vis (rviz/rviz)
auto-starting new master
process[master]: started with pid [6505]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 9f9e9f04-8bc2-11e7-ab49-10bf4802e9ef
process[rosout-1]: started with pid [6518]
started core service [/rosout]
process[svo-2]: started with pid [6536]
process[vis-3]: started with pid [6537]
process[svo_gui-4]: started with pid [6538]
[ INFO] [1503905368.353618231]: Found parameter: pipeline_is_stereo, value: 0
[ WARN] [1503905368.354739359]: Cannot find value for parameter: set_initial_attitude_from_gravity, assigning default: 1
[ WARN] [1503905368.355608147]: Cannot find value for parameter: automatic_reinitialization, assigning default: 0
[ INFO] [1503905368.358716792]: Found parameter: calib_file, value: /home/xxxx/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/calib/svo_test_pinhole.yaml
loaded 1 cameras
name = cam
size = [752, 480]
Projection = Pinhole
Focal length = (383.013, 382.392)
Principal point = (344.706, 244.327)
Distortion: Atan(0.932)
[ WARN] [1503905368.360813677]: Cannot find value for parameter: klt_max_level, assigning default: 4
[ WARN] [1503905368.361654246]: Cannot find value for parameter: klt_min_level, assigning default: 0
[ INFO] [1503905368.364081464]: Found parameter: reprojector_max_n_kfs, value: 5
[ INFO] [1503905368.367630233]: Found parameter: max_fts, value: 180
[ INFO] [1503905368.369590566]: Found parameter: grid_size, value: 30
[ WARN] [1503905368.370461410]: Cannot find value for parameter: reproject_unconverged_seeds, assigning default: 1
[ INFO] [1503905368.372960380]: Found parameter: reprojector_affine_est_offset, value: 1
[ INFO] [1503905368.376066977]: Found parameter: reprojector_affine_est_gain, value: 0
[ WARN] [1503905368.377131082]: Cannot find value for parameter: init_min_features, assigning default: 100
[ WARN] [1503905368.378335327]: Cannot find value for parameter: init_min_tracked, assigning default: 80
[ WARN] [1503905368.379482218]: Cannot find value for parameter: init_min_inliers, assigning default: 70
[ INFO] [1503905368.382400624]: Found parameter: init_min_disparity, value: 30
[ WARN] [1503905368.383003656]: Cannot find value for parameter: init_min_features_factor, assigning default: 2
[ WARN] [1503905368.383619175]: Cannot find value for parameter: reproj_err_thresh, assigning default: 2
[ WARN] [1503905368.384210617]: Cannot find value for parameter: init_disparity_pivot_ratio, assigning default: 0.5
[ WARN] [1503905368.384806852]: Cannot find value for parameter: init_method, assigning default: FivePoint
[ INFO] [1503905368.386782697]: Found parameter: grid_size, value: 30
[ INFO] [1503905368.388588079]: Found parameter: n_pyr_levels, value: 3
[ INFO] [1503905368.390797398]: Found parameter: detector_threshold_primary, value: 10
[ INFO] [1503905368.395400837]: Found parameter: detector_threshold_secondary, value: 200
[ WARN] [1503905368.396639542]: Cannot find value for parameter: use_edgelets, assigning default: 1
[ INFO] [1503905368.400412513]: Found parameter: n_pyr_levels, value: 3
[ WARN] [1503905368.401830056]: Cannot find value for parameter: use_threaded_depthfilter, assigning default: 1
[ INFO] [1503905368.405912557]: Found parameter: seed_convergence_sigma2_thresh, value: 200
[ INFO] [1503905368.409179077]: Found parameter: scan_epi_unit_sphere, value: 0
[ INFO] [1503905368.412417123]: Found parameter: depth_filter_affine_est_offset, value: 1
[ INFO] [1503905368.415656376]: Found parameter: depth_filter_affine_est_gain, value: 0
[ INFO] [1503905368.420464838]: Found parameter: max_fts, value: 180
[ WARN] [1503905368.422437965]: Cannot find value for parameter: max_seeds_ratio, assigning default: 3
[ INFO] [1503905368.428156797]: Found parameter: max_n_kfs, value: 30
[ INFO] [1503905368.433160499]: Found parameter: use_imu, value: 0
[ WARN] [1503905368.459941128]: Cannot find value for parameter: trace_dir, assigning default: /home/xxxx/svo_install_ws/install/share/svo/trace
[ WARN] [1503905368.460944007]: Cannot find value for parameter: quality_min_fts, assigning default: 50
[ WARN] [1503905368.461934634]: Cannot find value for parameter: quality_max_drop_fts, assigning default: 40
[ WARN] [1503905368.463312469]: Cannot find value for parameter: relocalization_max_trials, assigning default: 50
[ INFO] [1503905368.467903955]: Found parameter: poseoptim_prior_lambda, value: 0
[ INFO] [1503905368.471746492]: Found parameter: poseoptim_using_unit_sphere, value: 0
[ INFO] [1503905368.473845025]: Found parameter: img_align_prior_lambda_rot, value: 0
[ INFO] [1503905368.475951430]: Found parameter: img_align_prior_lambda_trans, value: 0
[ WARN] [1503905368.476709740]: Cannot find value for parameter: structure_optimization_max_pts, assigning default: 20
[ INFO] [1503905368.478860157]: Found parameter: map_scale, value: 1
[ INFO] [1503905368.481077020]: Found parameter: kfselect_criterion, value: FORWARD
[ WARN] [1503905368.481792754]: Cannot find value for parameter: kfselect_min_dist, assigning default: 0.12
[ INFO] [1503905368.483744476]: Found parameter: kfselect_numkfs_upper_thresh, value: 120
[ INFO] [1503905368.485722160]: Found parameter: kfselect_numkfs_lower_thresh, value: 70
[ INFO] [1503905368.487646365]: Found parameter: kfselect_min_dist_metric, value: 0.1
[ INFO] [1503905368.489510883]: Found parameter: kfselect_min_angle, value: 20
[ INFO] [1503905368.491390025]: Found parameter: kfselect_min_disparity, value: 40
[ WARN] [1503905368.492051439]: Cannot find value for parameter: kfselect_min_num_frames_between_kfs, assigning default: 2
[ INFO] [1503905368.494051356]: Found parameter: img_align_max_level, value: 4
[ INFO] [1503905368.496112193]: Found parameter: img_align_min_level, value: 2
[ WARN] [1503905368.496877473]: Cannot find value for parameter: img_align_robustification, assigning default: 0
[ WARN] [1503905368.497586983]: Cannot find value for parameter: img_align_use_distortion_jacobian, assigning default: 0
[ INFO] [1503905368.501141267]: Found parameter: img_align_est_illumination_gain, value: 0
[ INFO] [1503905368.505531879]: Found parameter: img_align_est_illumination_offset, value: 0
[ INFO] [1503905368.509430554]: Found parameter: poseoptim_thresh, value: 2
[ INFO] [1503905368.513366042]: Found parameter: update_seeds_with_old_keyframes, value: 1
[ INFO] [1503905368.516629768]: Found parameter: use_async_reprojectors, value: 0
[ INFO] [1503905368.516951734]: DepthFilter: created.
[ INFO] [1503905368.517032604]: DepthFilter: Start thread.
[ WARN] [1503905368.518419438]: Cannot find value for parameter: T_world_imuinit/tz, assigning default: 0
[ WARN] [1503905368.519527076]: Cannot find value for parameter: T_world_imuinit/ty, assigning default: 0
[ WARN] [1503905368.520631911]: Cannot find value for parameter: T_world_imuinit/tx, assigning default: 0
[ INFO] [1503905368.530467452]: Found parameter: T_world_imuinit/qz, value: 0
[ INFO] [1503905368.534482020]: Found parameter: T_world_imuinit/qy, value: 0
[ INFO] [1503905368.537775845]: Found parameter: T_world_imuinit/qx, value: 0
[ INFO] [1503905368.541727290]: Found parameter: T_world_imuinit/qw, value: 1
*** Aborted at 1503905368 (unix time) try "date -d @1503905368" if you are using GNU date ***
PC: @ 0x0 (unknown)
*** SIGSEGV (@0x2A) received by PID 6536 (TID 0x7ffb8bae3a40) from PID 42; stack trace: ***
@ 0x7ffb8aaa6cb0 (unknown)
@ 0x7ffb8b1153cb std::string::string()
@ 0x7ffb8b3b5102 svo::Visualizer::Visualizer()
@ 0x7ffb8b39278b svo::SvoInterface::SvoInterface()
@ 0x7ffb8b3b245f svo_ros::SvoNodeBase::SvoNodeBase()
@ 0x400c05 main
@ 0x7ffb8aa91f45 __libc_start_main
@ 0x400c7c (unknown)
@ 0x0 (unknown)
[svo-2] process has died [pid 6536, exit code -11, cmd /home/xxxx/svo_install_overlay_ws/devel/lib/svo_ros/svo_node __name:=svo __log:=/home/xxxx/.ros/log/9f9e9f04-8bc2-11e7-ab49-10bf4802e9ef/svo-2.log].
Can I ask the reason of exit code -11?? : )
I'm testing SVO2.0 with an external stereo camera with IMU disabled on Ubuntu 16.04 and ROS Kinetic. Now I have some problem when running SVO via fla_stereo_imu.launch. The program seemed not running properly as there was no trajectory of the camera displayed in Rviz and the information in the shell paused at the lines as shown below(no new information when I opened my camera):

while the program worked when I use the fla_stereo_imu.bag provided(even when I set use_imu to False, it still ran successfully). The information which corresponded to the one paused is as shown below:

To make use of the fla_stereo_imu.launch, I have made some modifications to match the external stereo camera:
Hi guys
I try to build svo2 in odroid xu4 ubuntu 14.04 but i got this err:
/root/svo_install_ws/install/lib/libsvo.so: file not recognized: File format not recognized
and this is my out put from build:
root@odroid-server:~/svo_install_overlay_ws# cat /root/svo_install_overlay_ws/build/build_logs/svo_ros.log
[svo_ros] ==> '/root/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/cmake /root/svo_install_overlay_ws/src/rpg_svo_example/svo_ros -DCATKIN_DEVEL_PREFIX=/root/svo_install_overlay_ws/devel -DCMAKE_INSTALL_PREFIX=/root/svo_install_overlay_ws/install -DCMAKE_BUILD_TYPE=Release' in '/root/svo_install_overlay_ws/build/svo_ros'
-- The C compiler identification is GNU 4.8.4
-- The CXX compiler identification is GNU 4.8.4
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Using CATKIN_DEVEL_PREFIX: /root/svo_install_overlay_ws/devel
-- Using CMAKE_PREFIX_PATH: /root/svo_install_ws/install;/opt/ros/indigo
-- This workspace overlays: /root/svo_install_ws/install;/opt/ros/indigo
-- Found PythonInterp: /usr/bin/python (found version "2.7.6")
-- Using PYTHON_EXECUTABLE: /usr/bin/python
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /root/svo_install_overlay_ws/build/svo_ros/test_results
-- Looking for include file pthread.h
-- Looking for include file pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Found gtest sources under '/usr/src/gtest': gtests will be built
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.6.19
-- Using these message generators: gencpp;genlisp;genpy
-- Marking SHARED_LIBRARY "svo_ros" of package "svo_ros" for installation
-- Marking EXECUTABLE "svo_node" of package "svo_ros" for installation
-- Marking SHARED_LIBRARY "svo_nodelet" of package "svo_ros" for installation
-- Marking HEADER FILES in "include" folder of package "svo_ros" for installation
-- Marking SHARED CONTENT FOLDER "launch" of package "svo_ros" for installation
-- Marking SHARED CONTENT FOLDER "param" of package "svo_ros" for installation
-- Configuring done
-- Generating done
-- Build files have been written to: /root/svo_install_overlay_ws/build/svo_ros
[svo_ros] <== '/root/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/cmake /root/svo_install_overlay_ws/src/rpg_svo_example/svo_ros -DCATKIN_DEVEL_PREFIX=/root/svo_install_overlay_ws/devel -DCMAKE_INSTALL_PREFIX=/root/svo_install_overlay_ws/install -DCMAKE_BUILD_TYPE=Release' finished with return code '0'
[svo_ros] ==> '/root/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' in '/root/svo_install_overlay_ws/build/svo_ros'
Scanning dependencies of target topic_tools_generate_messages_cpp
Scanning dependencies of target geometry_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_msgs_generate_messages_lisp
Scanning dependencies of target geometry_msgs_generate_messages_py
Scanning dependencies of target actionlib_msgs_generate_messages_py
Scanning dependencies of target nodelet_generate_messages_cpp
Scanning dependencies of target nodelet_generate_messages_lisp
Scanning dependencies of target rosgraph_msgs_generate_messages_py
[ 0%] [ 0%] [ 0%] Built target topic_tools_generate_messages_cpp
Built target actionlib_msgs_generate_messages_lisp
Built target geometry_msgs_generate_messages_lisp
[ 0%] [ 0%] [ 0%] [ 0%] Built target actionlib_msgs_generate_messages_py
Built target nodelet_generate_messages_cpp
Built target geometry_msgs_generate_messages_py
[ 0%] Built target nodelet_generate_messages_lisp
Built target rosgraph_msgs_generate_messages_py
Scanning dependencies of target std_msgs_generate_messages_py
Scanning dependencies of target nav_msgs_generate_messages_lisp
Scanning dependencies of target rosgraph_msgs_generate_messages_cpp
Scanning dependencies of target roscpp_generate_messages_py
Scanning dependencies of target geometry_msgs_generate_messages_cpp
Scanning dependencies of target nav_msgs_generate_messages_py
Scanning dependencies of target bond_generate_messages_cpp
Scanning dependencies of target bond_generate_messages_lisp
[ 0%] [ 0%] [ 0%] Built target std_msgs_generate_messages_py
[ 0%] [ 0%] Built target nav_msgs_generate_messages_lisp
Built target roscpp_generate_messages_py
[ 0%] Built target rosgraph_msgs_generate_messages_cpp
Built target geometry_msgs_generate_messages_cpp
Built target nav_msgs_generate_messages_py
[ 0%] Built target bond_generate_messages_cpp
[ 0%] Scanning dependencies of target nodelet_generate_messages_py
Built target bond_generate_messages_lisp
Scanning dependencies of target bond_generate_messages_py
Scanning dependencies of target sensor_msgs_generate_messages_cpp
Scanning dependencies of target nav_msgs_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_py
[ 0%] [ 0%] Built target bond_generate_messages_py
Built target nodelet_generate_messages_py
[ 0%] [ 0%] [ 0%] Built target sensor_msgs_generate_messages_lisp
Built target sensor_msgs_generate_messages_cpp
Scanning dependencies of target dynamic_reconfigure_gencfg
[ 0%] Built target nav_msgs_generate_messages_cpp
Built target visualization_msgs_generate_messages_py
Scanning dependencies of target tf_generate_messages_py
[ 0%] Scanning dependencies of target visualization_msgs_generate_messages_cpp
Scanning dependencies of target roscpp_generate_messages_lisp
Scanning dependencies of target actionlib_msgs_generate_messages_cpp
Built target dynamic_reconfigure_gencfg
Scanning dependencies of target sensor_msgs_generate_messages_py
Scanning dependencies of target tf_generate_messages_lisp
[ 0%] Scanning dependencies of target visualization_msgs_generate_messages_lisp
[ 0%] [ 0%] Built target tf_generate_messages_py
Built target roscpp_generate_messages_lisp
Built target visualization_msgs_generate_messages_cpp
[ 0%] [ 0%] [ 0%] Built target actionlib_msgs_generate_messages_cpp
Built target sensor_msgs_generate_messages_py
Built target tf_generate_messages_lisp
Scanning dependencies of target rosgraph_msgs_generate_messages_lisp
[ 0%] Built target visualization_msgs_generate_messages_lisp
Scanning dependencies of target std_msgs_generate_messages_cpp
Scanning dependencies of target roscpp_generate_messages_cpp
Scanning dependencies of target std_msgs_generate_messages_lisp
[ 0%] Scanning dependencies of target tf_generate_messages_cpp
Scanning dependencies of target pcl_ros_gencfg
Built target rosgraph_msgs_generate_messages_lisp
[ 0%] [ 0%] Scanning dependencies of target dynamic_reconfigure_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_cpp
Built target roscpp_generate_messages_cpp
Built target std_msgs_generate_messages_lisp
[ 0%] Scanning dependencies of target actionlib_generate_messages_cpp
[ 0%] Built target pcl_ros_gencfg
Scanning dependencies of target actionlib_generate_messages_py
Scanning dependencies of target actionlib_generate_messages_lisp
[ 0%] Built target dynamic_reconfigure_generate_messages_lisp
Built target tf_generate_messages_cpp
Scanning dependencies of target tf2_msgs_generate_messages_lisp
Scanning dependencies of target tf2_msgs_generate_messages_cpp
[ 0%] Built target actionlib_generate_messages_cpp
[ 0%] [ 0%] [ 0%] Built target actionlib_generate_messages_py
Built target actionlib_generate_messages_lisp
Built target tf2_msgs_generate_messages_lisp
[ 0%] Built target tf2_msgs_generate_messages_cpp
Scanning dependencies of target tf2_msgs_generate_messages_py
Scanning dependencies of target svo_msgs_generate_messages_py
Scanning dependencies of target svo_msgs_generate_messages_lisp
[ 0%] Scanning dependencies of target svo_msgs_generate_messages_cpp
Built target tf2_msgs_generate_messages_py
Scanning dependencies of target dynamic_reconfigure_generate_messages_py
Scanning dependencies of target pcl_msgs_generate_messages_cpp
[ 0%] [ 0%] Scanning dependencies of target dynamic_reconfigure_generate_messages_cpp
Built target svo_msgs_generate_messages_py
Scanning dependencies of target pcl_msgs_generate_messages_lisp
Built target svo_msgs_generate_messages_lisp
[ 0%] [ 0%] Scanning dependencies of target topic_tools_generate_messages_py
Built target svo_msgs_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_generate_messages_py
Built target pcl_msgs_generate_messages_cpp
[ 0%] [ 0%] [ 0%] Built target dynamic_reconfigure_generate_messages_cpp
Built target pcl_msgs_generate_messages_lisp
Built target topic_tools_generate_messages_py
Scanning dependencies of target pcl_msgs_generate_messages_py
Scanning dependencies of target topic_tools_generate_messages_lisp
[ 0%] Built target pcl_msgs_generate_messages_py
[ 0%] Built target topic_tools_generate_messages_lisp
Scanning dependencies of target svo_ros
[ 16%] [ 33%] [ 50%] [ 66%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
Linking CXX shared library /root/svo_install_overlay_ws/devel/lib/libsvo_ros.so
/root/svo_install_ws/install/lib/libsvo.so: file not recognized: File format not recognized
collect2: error: ld returned 1 exit status
make[2]: *** [/root/svo_install_overlay_ws/devel/lib/libsvo_ros.so] Error 1
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
make: *** [all] Error 2
[svo_ros] <== '/root/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
I am trying to move Clearpath husky around the corridor with loops using monocular camera. But the map scale changes while moving the robot around. Are there any specific parameters I can tweak? I am not sure if adding IMU will help or not. Here are some images for reference...


Hello
Could you please clarify the coordinate frames used for the camera/imu?
Is it both NED or do you follow this convention:
https://github.com/ethz-asl/rovio/wiki/Coordinate-Frames-and-Notation
thanks in advance
Hi,
Bit confused with your installation instruction.
In the install.md file, it says that "Copy the svo_install_ws to where you want to install the binaries", which svo_install_ws ar eyou talking about? In the repository there are not file named that.
Is there a easy way to install this in cakin workspace?
Thanks in advance for you help.
Bikram
Hi guys
I try to build svo2 in UDOO QUAD ubuntu 14.04 but i got this err:
[svo_ros] ==> '/home/udooer/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' in '/home/udooer/svo_install_overlay_ws/build/svo_ros'
Scanning dependencies of target nodelet_generate_messages_lisp
Scanning dependencies of target sensor_msgs_generate_messages_lisp
Scanning dependencies of target geometry_msgs_generate_messages_cpp
Scanning dependencies of target svo_msgs_generate_messages_cpp
[ 0%] [ 0%] [ 0%] Built target sensor_msgs_generate_messages_lisp
Built target geometry_msgs_generate_messages_cpp
Built target nodelet_generate_messages_lisp
[ 0%] Built target svo_msgs_generate_messages_cpp
Scanning dependencies of target nodelet_generate_messages_py
Scanning dependencies of target tf_generate_messages_cpp
Scanning dependencies of target nav_msgs_generate_messages_lisp
[ 0%] Scanning dependencies of target geometry_msgs_generate_messages_lisp
Built target nodelet_generate_messages_py
[ 0%] [ 0%] Built target tf_generate_messages_cpp
Built target nav_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_cpp
Scanning dependencies of target bond_generate_messages_py
Scanning dependencies of target bond_generate_messages_lisp
[ 0%] Scanning dependencies of target std_msgs_generate_messages_lisp
Built target visualization_msgs_generate_messages_cpp
[ 0%] [ 0%] Built target bond_generate_messages_lisp
Scanning dependencies of target bond_generate_messages_cpp
Built target bond_generate_messages_py
[ 0%] Built target std_msgs_generate_messages_lisp
[ 0%] Scanning dependencies of target tf2_msgs_generate_messages_lisp
Scanning dependencies of target std_msgs_generate_messages_cpp
Built target bond_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_cpp
[ 0%] Scanning dependencies of target actionlib_msgs_generate_messages_cpp
Built target tf2_msgs_generate_messages_lisp
[ 0%] [ 0%] Built target std_msgs_generate_messages_cpp
Built target sensor_msgs_generate_messages_cpp
[ 0%] Scanning dependencies of target nav_msgs_generate_messages_py
Built target actionlib_msgs_generate_messages_cpp
Scanning dependencies of target roscpp_generate_messages_lisp
Scanning dependencies of target nav_msgs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_py
Scanning dependencies of target std_msgs_generate_messages_py
[ 0%] Built target nav_msgs_generate_messages_cpp
[ 0%] Scanning dependencies of target tf_generate_messages_py
Built target roscpp_generate_messages_lisp
[ 0%] Scanning dependencies of target nodelet_generate_messages_cpp
Built target std_msgs_generate_messages_py
[ 0%] Built target tf_generate_messages_py
Scanning dependencies of target roscpp_generate_messages_py
[ 0%] Built target nodelet_generate_messages_cpp
Scanning dependencies of target rosgraph_msgs_generate_messages_cpp
Scanning dependencies of target geometry_msgs_generate_messages_py
[ 0%] Scanning dependencies of target roscpp_generate_messages_cpp
Built target roscpp_generate_messages_py
[ 0%] Built target rosgraph_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target roscpp_generate_messages_cpp
Scanning dependencies of target actionlib_msgs_generate_messages_py
Scanning dependencies of target rosgraph_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_msgs_generate_messages_lisp
Scanning dependencies of target rosgraph_msgs_generate_messages_py
[ 0%] Built target actionlib_msgs_generate_messages_py
[ 0%] [ 0%] Built target actionlib_msgs_generate_messages_lisp
Built target rosgraph_msgs_generate_messages_lisp
[ 0%] Built target rosgraph_msgs_generate_messages_py
Scanning dependencies of target sensor_msgs_generate_messages_py
Scanning dependencies of target visualization_msgs_generate_messages_py
Scanning dependencies of target visualization_msgs_generate_messages_lisp
Scanning dependencies of target tf_generate_messages_lisp
[ 0%] Built target visualization_msgs_generate_messages_lisp
[ 0%] [ 0%] Built target sensor_msgs_generate_messages_py
Built target visualization_msgs_generate_messages_py
[ 0%] Built target tf_generate_messages_lisp
Scanning dependencies of target actionlib_generate_messages_lisp
Scanning dependencies of target actionlib_generate_messages_cpp
Scanning dependencies of target tf2_msgs_generate_messages_cpp
Scanning dependencies of target svo_msgs_generate_messages_py
[ 0%] [ 0%] Built target actionlib_generate_messages_lisp
[ 0%] Built target tf2_msgs_generate_messages_cpp
Built target actionlib_generate_messages_cpp
[ 0%] Built target svo_msgs_generate_messages_py
Scanning dependencies of target tf2_msgs_generate_messages_py
Scanning dependencies of target svo_msgs_generate_messages_lisp
Scanning dependencies of target actionlib_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_py
[ 0%] Built target svo_msgs_generate_messages_lisp
[ 0%] Built target actionlib_generate_messages_py
Scanning dependencies of target svo_ros
[ 16%] [ 33%] [ 50%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
[ 66%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
In file included from /home/udooer/svo_install_ws/install/include/svo/direct/matcher.h:12:0,
from /home/udooer/svo_install_ws/install/include/svo/direct/depth_filter.h:17,
from /home/udooer/svo_install_ws/install/include/svo/svo.h:9,
from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_factory.cpp:2:
/home/udooer/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
In file included from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_interface.h:11:0,
from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_node_base.h:3,
from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_node_base.cpp:1:
/home/udooer/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
In file included from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_interface.h:11:0,
from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_interface.cpp:1:
/home/udooer/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
In file included from /home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/visualizer.cpp:6:0:
/home/udooer/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/visualizer.h:23:33: fatal error: pcl_ros/point_cloud.h: No such file or directory
#include <pcl_ros/point_cloud.h>
^
compilation terminated.
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o] Error 1
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o] Error 1
make[2]: *** [CMakeFiles/svo_ros.dir/src/visualizer.cpp.o] Error 1
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
make: *** [all] Error 2
[svo_ros] <== '/home/udooer/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
Failed <== svo_ros [ 1 minute and 26.4 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/udooer/svo_install_overlay_ws/build/svo_ros && /home/udooer/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
cat /home/udooer/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
Hi,
Thanks for releasing the exciting academic work, I am glad to test it, but it seems the binary link is empty.
WARNING: Your current environment's CMAKE_PREFIX_PATH is different from the
cached CMAKE_PREFIX_PATH used the last time this workspace was built.
If you want to use a different CMAKE_PREFIX_PATH you should call catkin clean --all to remove all references to the previous CMAKE_PREFIX_PATH.
Found '1' packages in 0.0 seconds.
Starting ==> svo_ros
[svo_ros] ==> '/home/nuc/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j' in '/home/nuc/svo_install_overlay_ws/build/svo_ros'
[ 0%] Built target svo_msgs_generate_messages_cpp
[ 0%] Built target topic_tools_generate_messages_lisp
[ 0%] Built target topic_tools_generate_messages_eus
[ 0%] Built target topic_tools_generate_messages_nodejs
[ 0%] Built target std_srvs_generate_messages_py
[ 0%] Built target topic_tools_generate_messages_cpp
[ 0%] Built target std_srvs_generate_messages_nodejs
[ 0%] Built target pcl_msgs_generate_messages_eus
[ 0%] Built target pcl_msgs_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_generate_messages_py
[ 0%] Built target dynamic_reconfigure_generate_messages_lisp
[ 0%] Built target dynamic_reconfigure_generate_messages_nodejs
[ 0%] Built target dynamic_reconfigure_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_lisp
[ 0%] Built target roscpp_generate_messages_py
[ 0%] Built target pcl_msgs_generate_messages_nodejs
[ 0%] Built target nav_msgs_generate_messages_lisp
[ 0%] Built target std_srvs_generate_messages_eus
[ 0%] Built target bond_generate_messages_eus
[ 0%] Built target roscpp_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target geometry_msgs_generate_messages_eus
[ 0%] Built target bond_generate_messages_lisp
[ 0%] Built target rosgraph_msgs_generate_messages_nodejs
[ 0%] Built target std_srvs_generate_messages_cpp
[ 0%] Built target sensor_msgs_generate_messages_lisp
[ 0%] Built target nav_msgs_generate_messages_cpp
[ 0%] Built target bond_generate_messages_py
[ 0%] Built target nodelet_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_nodejs
[ 0%] Built target nodelet_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target visualization_msgs_generate_messages_lisp
[ 0%] Built target visualization_msgs_generate_messages_nodejs
[ 0%] Built target topic_tools_generate_messages_py
[ 0%] Built target actionlib_msgs_generate_messages_nodejs
[ 0%] Built target nodelet_generate_messages_nodejs
[ 0%] Built target svo_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_nodejs
[ 0%] Built target roscpp_generate_messages_cpp
[ 0%] Built target actionlib_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target geometry_msgs_generate_messages_nodejs
[ 0%] Built target bond_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_lisp
[ 0%] Built target roscpp_generate_messages_nodejs
[ 0%] Built target nodelet_generate_messages_lisp
[ 0%] Built target roscpp_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_py
[ 0%] Built target actionlib_msgs_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_cpp
[ 0%] Built target std_srvs_generate_messages_lisp
[ 0%] Built target sensor_msgs_generate_messages_eus
[ 0%] Built target actionlib_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target tf_generate_messages_eus
[ 0%] Built target actionlib_msgs_generate_messages_cpp
[ 0%] Built target actionlib_msgs_generate_messages_lisp
[ 0%] Built target actionlib_msgs_generate_messages_py
[ 0%] Built target visualization_msgs_generate_messages_eus
[ 0%] Built target visualization_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_cpp
[ 0%] Built target sensor_msgs_generate_messages_py
[ 0%] Built target nodelet_generate_messages_py
[ 0%] Built target dynamic_reconfigure_generate_messages_cpp
[ 0%] Built target tf_generate_messages_py
[ 0%] Built target svo_msgs_generate_messages_nodejs
[ 0%] Built target tf_generate_messages_lisp
[ 0%] Built target svo_msgs_generate_messages_eus
[ 0%] Built target tf_generate_messages_nodejs
[ 0%] Built target svo_msgs_generate_messages_lisp
[ 0%] Built target pcl_msgs_generate_messages_py
[ 0%] Built target actionlib_generate_messages_eus
[ 0%] Built target pcl_msgs_generate_messages_lisp
[ 0%] Built target pcl_ros_gencfg
[ 0%] Built target actionlib_generate_messages_nodejs
[ 0%] Built target tf_generate_messages_cpp
[ 0%] Built target tf2_msgs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_eus
[ 0%] Built target tf2_msgs_generate_messages_eus
[ 0%] Built target dynamic_reconfigure_gencfg
[ 0%] Built target visualization_msgs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_lisp
[ 0%] Built target actionlib_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_nodejs
[ 0%] Built target bond_generate_messages_nodejs
[ 11%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
[ 22%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
[ 44%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
[ 44%] Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
c++: error: unrecognized command line option -mfpu=neon
CMakeFiles/svo_ros.dir/build.make:62: recipe for target 'CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o' failed
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
CMakeFiles/svo_ros.dir/build.make:134: recipe for target 'CMakeFiles/svo_ros.dir/src/visualizer.cpp.o' failed
make[2]: *** [CMakeFiles/svo_ros.dir/src/visualizer.cpp.o] Error 1
CMakeFiles/svo_ros.dir/build.make:86: recipe for target 'CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o' failed
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o] Error 1
c++: error: unrecognized command line option -mfpu=neon
CMakeFiles/svo_ros.dir/build.make:110: recipe for target 'CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o' failed
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o] Error 1
CMakeFiles/Makefile2:416: recipe for target 'CMakeFiles/svo_ros.dir/all' failed
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[svo_ros] <== '/home/nuc/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j' failed with return code '2'
Failed <== svo_ros [ 0.8 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/nuc/svo_install_overlay_ws/build/svo_ros && /home/nuc/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j; cd -
cat /home/nuc/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
[build] Runtime: 0.9 seconds
Thanks for your sharing!
I customize below three config files for EuRoC V102 dataset, and test your binary:
The launch file:

The calib file:

The param file:

And the test completely runs to the end of the dataset, however, the trajectory jumps in the middle part, and I cannot get a continuous trajectory. Below is my running:

Can I know the reason why this happened? Do I give the wrong params, e.g. params of the IMU?
This is my build log.
[�[36msvo_ros�[0m] �[1m�[34m==>�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make cmake_check_build_system�[0m' �[30m�[1min�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros�[0m'�[0m
[�[36msvo_ros�[0m] �[32m<==�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make cmake_check_build_system�[0m' finished with return code '�[1m0�[0m'�[0m
[�[36msvo_ros�[0m] �[1m�[34m==>�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j�[0m' �[30m�[1min�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros�[0m'�[0m
[ 0%] Built target topic_tools_generate_messages_py
[ 0%] Built target std_srvs_generate_messages_cpp
[ 0%] Built target topic_tools_generate_messages_lisp
[ 0%] Built target actionlib_msgs_generate_messages_nodejs
[ 0%] Built target tf2_msgs_generate_messages_py
[ 0%] Built target actionlib_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target nav_msgs_generate_messages_nodejs
[ 0%] Built target roscpp_generate_messages_py
[ 0%] Built target roscpp_generate_messages_cpp
[ 0%] Built target nodelet_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_nodejs
[ 0%] Built target nav_msgs_generate_messages_py
[ 0%] Built target rosgraph_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target dynamic_reconfigure_generate_messages_nodejs
[ 0%] Built target rosgraph_msgs_generate_messages_lisp
[ 0%] Built target pcl_msgs_generate_messages_nodejs
[ 0%] Built target std_srvs_generate_messages_nodejs
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target geometry_msgs_generate_messages_lisp
[ 0%] Built target std_srvs_generate_messages_lisp
[ 0%] Built target bond_generate_messages_py
[ 0%] Built target nodelet_generate_messages_lisp
[ 0%] Built target svo_msgs_generate_messages_lisp
[ 0%] Built target actionlib_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_lisp
[ 0%] Built target actionlib_generate_messages_lisp
[ 0%] Built target tf_generate_messages_cpp
[ 0%] Built target std_srvs_generate_messages_eus
[ 0%] Built target geometry_msgs_generate_messages_eus
[ 0%] Built target geometry_msgs_generate_messages_nodejs
[ 0%] Built target nodelet_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_lisp
[ 0%] Built target dynamic_reconfigure_generate_messages_lisp
[ 0%] Built target nodelet_generate_messages_nodejs
[ 0%] Built target actionlib_msgs_generate_messages_cpp
[ 0%] Built target sensor_msgs_generate_messages_eus
[ 0%] Built target actionlib_generate_messages_nodejs
[ 0%] Built target visualization_msgs_generate_messages_cpp
[ 0%] Built target rosgraph_msgs_generate_messages_nodejs
[ 0%] Built target topic_tools_generate_messages_nodejs
[ 0%] Built target sensor_msgs_generate_messages_lisp
[ 0%] Built target bond_generate_messages_cpp
[ 0%] Built target roscpp_generate_messages_lisp
[ 0%] Built target tf_generate_messages_nodejs
[ 0%] Built target std_srvs_generate_messages_py
[ 0%] Built target bond_generate_messages_eus
[ 0%] Built target roscpp_generate_messages_eus
[ 0%] Built target bond_generate_messages_lisp
[ 0%] Built target nodelet_generate_messages_eus
[ 0%] Built target topic_tools_generate_messages_cpp
[ 0%] Built target topic_tools_generate_messages_eus
[ 0%] Built target rosgraph_msgs_generate_messages_cpp
[ 0%] Built target pcl_msgs_generate_messages_eus
[ 0%] Built target pcl_ros_gencfg
[ 0%] Built target tf2_msgs_generate_messages_eus
[ 0%] Built target nav_msgs_generate_messages_eus
[ 0%] Built target visualization_msgs_generate_messages_lisp
[ 0%] Built target visualization_msgs_generate_messages_nodejs
[ 0%] Built target tf_generate_messages_lisp
[ 0%] Built target svo_msgs_generate_messages_eus
[ 0%] Built target visualization_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target sensor_msgs_generate_messages_nodejs
[ 0%] Built target roscpp_generate_messages_nodejs
[ 0%] Built target sensor_msgs_generate_messages_py
[ 0%] Built target rosgraph_msgs_generate_messages_py
[ 0%] Built target actionlib_generate_messages_cpp
[ 0%] Built target tf_generate_messages_eus
[ 0%] Built target tf_generate_messages_py
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target actionlib_generate_messages_eus
[ 0%] Built target dynamic_reconfigure_generate_messages_py
[ 0%] Built target actionlib_generate_messages_py
[ 0%] Built target tf2_msgs_generate_messages_cpp
[ 0%] Built target nav_msgs_generate_messages_cpp
[ 0%] Built target tf2_msgs_generate_messages_lisp
[ 0%] Built target actionlib_msgs_generate_messages_py
[ 0%] Built target svo_msgs_generate_messages_nodejs
[ 0%] Built target svo_msgs_generate_messages_cpp
[ 0%] Built target svo_msgs_generate_messages_py
[ 0%] Built target dynamic_reconfigure_gencfg
[ 0%] Built target dynamic_reconfigure_generate_messages_cpp
[ 0%] Built target bond_generate_messages_nodejs
[ 0%] Built target pcl_msgs_generate_messages_lisp
[ 0%] Built target dynamic_reconfigure_generate_messages_eus
[ 0%] Built target visualization_msgs_generate_messages_eus
[ 0%] Built target pcl_msgs_generate_messages_py
[ 0%] Built target pcl_msgs_generate_messages_cpp
make[2]: *** No rule to make target '/home/upboard/svo_install_ws/install/lib/libgflags.so', needed by '/home/upboard/svo_install_overlay_ws/devel/lib/libsvo_ros.so'. Stop.
CMakeFiles/Makefile2:2050: recipe for target 'CMakeFiles/svo_ros.dir/all' failed
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[�[36msvo_ros�[0m] �[1m�[31m<==�[0m '�[1m/home/upboard/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j�[0m' �[31mfailed with return code�[0m '�[1m2�[0m'�[0m
I use UPboard with Ubuntu 16.04.3 desktop-amd64 and install ros kinetic version. Did anyone has the same problem and be solved?
Hi,
I was building the binary on ubuntu16.04, but errors happend.
[ 0%] Built target actionlib_msgs_generate_messages_py
[ 0%] Built target svo_msgs_generate_messages_cpp
[ 0%] Built target svo_msgs_generate_messages_nodejs
Scanning dependencies of target svo_msgs_generate_messages_py
Scanning dependencies of target dynamic_reconfigure_generate_messages_cpp
Scanning dependencies of target dynamic_reconfigure_gencfg
Scanning dependencies of target pcl_msgs_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_generate_messages_cpp
[ 0%] Built target dynamic_reconfigure_gencfg
[ 0%] Built target svo_msgs_generate_messages_py
[ 0%] Built target pcl_msgs_generate_messages_cpp
Scanning dependencies of target bond_generate_messages_nodejs
Scanning dependencies of target pcl_msgs_generate_messages_lisp
Scanning dependencies of target visualization_msgs_generate_messages_eus
Scanning dependencies of target dynamic_reconfigure_generate_messages_eus
[ 0%] Built target pcl_msgs_generate_messages_lisp
[ 0%] Built target bond_generate_messages_nodejs
[ 0%] Built target visualization_msgs_generate_messages_eus
[ 0%] Built target dynamic_reconfigure_generate_messages_eus
Scanning dependencies of target pcl_msgs_generate_messages_py
Scanning dependencies of target sensor_msgs_generate_messages_lisp
Scanning dependencies of target topic_tools_generate_messages_lisp
Scanning dependencies of target topic_tools_generate_messages_nodejs
[ 0%] Built target sensor_msgs_generate_messages_lisp
[ 0%] Built target pcl_msgs_generate_messages_py
[ 0%] Built target topic_tools_generate_messages_lisp
[ 0%] Built target topic_tools_generate_messages_nodejs
Scanning dependencies of target svo_ros
[ 11%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
[ 22%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
[ 33%] Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
[ 44%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
[ 55%] Linking CXX shared library /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/devel/lib/libsvo_ros.so
[ 55%] Built target svo_ros
Scanning dependencies of target svo_nodelet
Scanning dependencies of target svo_node
[ 66%] Building CXX object CMakeFiles/svo_nodelet.dir/src/svo_nodelet.cpp.o
[ 77%] Building CXX object CMakeFiles/svo_node.dir/src/svo_node.cpp.o
[ 88%] Linking CXX executable /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/devel/lib/svo_ros/svo_node
[100%] Linking CXX shared library /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/devel/lib/libsvo_nodelet.so
[100%] Built target svo_nodelet
/usr/bin/ld: warning: libopencv_core3.so.3.2, needed by /home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_highgui3.so.3.2, needed by /home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_imgproc3.so.3.2, needed by /home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_imgcodecs3.so.3.2, needed by /home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libvikit_cameras.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_calib3d3.so.3.2, needed by /home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libvikit_common.so, not found (try using -rpath or -rpath-link)
/home/x/workspace/svo_binaries_1604_kinetic/svo_install_ws/install/lib/libvikit_common.socv::findHomography(cv::_InputArray const&, cv::_InputArray const&, int, double, cv::_OutputArray const&, int, double)
[svo_ros] <== '/home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
Failed <== svo_ros [ 37.0 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/build/svo_ros && /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
cat /home/x/workspace/svo_binaries_1604_kinetic/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
[build] Runtime: 37.2 seconds
Hi, while catkin build, i got error-
~/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_interface.h:11:30: fatal error: svo/common/types.h: No such file or directory
#include <svo/common/types.h>
^
compilation terminated.
CMakeFiles/svo_ros.dir/build.make:62: recipe for target 'CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o' failed
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o] Error 1
CMakeFiles/Makefile2:404: recipe for target 'CMakeFiles/svo_ros.dir/all' failed
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
Makefile:140: recipe for target 'all' failed
make: *** [all] Error 2
Any solution?
Thanks.
Why don't support Scaramuzza's camera model?
https://sites.google.com/site/scarabotix/ocamcalib-toolbox
I think it's a very high accurate camera model for all cameras (small FOV, fisheye, and omnidirectional cameras)
The message type built previously for SVO 1.0 for "/dense_input" does not match the message type of SVO 2.0 and as a result the REMODE does not work with it.
Hi, recently I found SVO example can't be built due to some error as follows: (Ubuntu 16.04, ROS Kinetic)
Scanning dependencies of target svo_ros
[ 11%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
[ 22%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
[ 33%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
[ 44%] Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
[ 55%] Linking CXX shared library /home/bcs/svo_install_overlay_ws/devel/lib/libsvo_ros.so
[ 55%] Built target svo_ros
Scanning dependencies of target svo_nodelet
Scanning dependencies of target svo_node
[ 77%] Building CXX object CMakeFiles/svo_node.dir/src/svo_node.cpp.o
[ 77%] Building CXX object CMakeFiles/svo_nodelet.dir/src/svo_nodelet.cpp.o
[ 88%] Linking CXX executable /home/bcs/svo_install_overlay_ws/devel/lib/svo_ros/svo_node
[100%] Linking CXX shared library /home/bcs/svo_install_overlay_ws/devel/lib/libsvo_nodelet.so
/usr/bin/ld: warning: libopencv_core3.so.3.2, needed by /home/bcs/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_highgui3.so.3.2, needed by /home/bcs/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_imgproc3.so.3.2, needed by /home/bcs/svo_install_ws/install/lib/libsvo.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_imgcodecs3.so.3.2, needed by /home/bcs/svo_install_ws/install/lib/libvikit_cameras.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libopencv_calib3d3.so.3.2, needed by /home/bcs/svo_install_ws/install/lib/libvikit_common.so, not found (try using -rpath or -rpath-link)
/home/bcs/svo_install_ws/install/lib/libvikit_common.socv::findHomography(cv::_InputArray const&, cv::_InputArray const&, int, double, cv::_OutputArray const&, int, double)
/home/bcs/svo_install_ws/install/lib/libsvo.socv::waitKey(int)
/home/bcs/svo_install_ws/install/lib/libsvo.socv::imshow(cv::String const&, cv::_InputArray const&)
collect2: error: ld returned 1 exit status
CMakeFiles/svo_node.dir/build.make:583: recipe for target '/home/bcs/svo_install_overlay_ws/devel/lib/svo_ros/svo_node' failed
make[2]: *** [/home/bcs/svo_install_overlay_ws/devel/lib/svo_ros/svo_node] Error 1
CMakeFiles/Makefile2:159: recipe for target 'CMakeFiles/svo_node.dir/all' failed
make[1]: *** [CMakeFiles/svo_node.dir/all] Error 2
make[1]: *** ....
[100%] Built target svo_nodelet
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[svo_ros] <== '/home/bcs/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
Failed <== svo_ros [ 1 minute and 37.4 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
# Command to reproduce:
cd /home/bcs/svo_install_overlay_ws/build/svo_ros && /home/bcs/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
# Path to log:
cat /home/bcs/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
[build] Runtime: 1 minute and 38.0 seconds
As suggested in a previous closed issue, I have checked my opencv libraries using ls -l /opt/ros/kinetic/lib/ | grep opencv. And I got
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_aruco3.so -> libopencv_aruco3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_aruco3.so.3.3 -> libopencv_aruco3.so.3.3.1
-rw-r--r-- 1 root root 308784 11月 7 02:47 libopencv_aruco3.so.3.3.1
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_bgsegm3.so -> libopencv_bgsegm3.so.3.3
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_bgsegm3.so.3.3 -> libopencv_bgsegm3.so.3.3.1
-rw-r--r-- 1 root root 76168 11月 7 02:47 libopencv_bgsegm3.so.3.3.1
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_bioinspired3.so -> libopencv_bioinspired3.so.3.3
lrwxrwxrwx 1 root root 31 11月 7 02:47 libopencv_bioinspired3.so.3.3 -> libopencv_bioinspired3.so.3.3.1
-rw-r--r-- 1 root root 277704 11月 7 02:47 libopencv_bioinspired3.so.3.3.1
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_calib3d3.so -> libopencv_calib3d3.so.3.3
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_calib3d3.so.3.3 -> libopencv_calib3d3.so.3.3.1
-rw-r--r-- 1 root root 1586904 11月 7 02:47 libopencv_calib3d3.so.3.3.1
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_ccalib3.so -> libopencv_ccalib3.so.3.3
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_ccalib3.so.3.3 -> libopencv_ccalib3.so.3.3.1
-rw-r--r-- 1 root root 434232 11月 7 02:47 libopencv_ccalib3.so.3.3.1
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_core3.so -> libopencv_core3.so.3.3
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_core3.so.3.3 -> libopencv_core3.so.3.3.1
-rw-r--r-- 1 root root 12978328 11月 7 02:47 libopencv_core3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_cvv3.so -> libopencv_cvv3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_cvv3.so.3.3 -> libopencv_cvv3.so.3.3.1
-rw-r--r-- 1 root root 1345856 11月 7 02:47 libopencv_cvv3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_datasets3.so -> libopencv_datasets3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_datasets3.so.3.3 -> libopencv_datasets3.so.3.3.1
-rw-r--r-- 1 root root 449448 11月 7 02:47 libopencv_datasets3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_dnn3.so -> libopencv_dnn3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_dnn3.so.3.3 -> libopencv_dnn3.so.3.3.1
-rw-r--r-- 1 root root 6626600 11月 7 02:47 libopencv_dnn3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_dpm3.so -> libopencv_dpm3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_dpm3.so.3.3 -> libopencv_dpm3.so.3.3.1
-rw-r--r-- 1 root root 129704 11月 7 02:47 libopencv_dpm3.so.3.3.1
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_face3.so -> libopencv_face3.so.3.3
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_face3.so.3.3 -> libopencv_face3.so.3.3.1
-rw-r--r-- 1 root root 170832 11月 7 02:47 libopencv_face3.so.3.3.1
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_features2d3.so -> libopencv_features2d3.so.3.3
lrwxrwxrwx 1 root root 30 11月 7 02:47 libopencv_features2d3.so.3.3 -> libopencv_features2d3.so.3.3.1
-rw-r--r-- 1 root root 869016 11月 7 02:47 libopencv_features2d3.so.3.3.1
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_flann3.so -> libopencv_flann3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_flann3.so.3.3 -> libopencv_flann3.so.3.3.1
-rw-r--r-- 1 root root 334880 11月 7 02:47 libopencv_flann3.so.3.3.1
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_fuzzy3.so -> libopencv_fuzzy3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_fuzzy3.so.3.3 -> libopencv_fuzzy3.so.3.3.1
-rw-r--r-- 1 root root 113136 11月 7 02:47 libopencv_fuzzy3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_hdf3.so -> libopencv_hdf3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_hdf3.so.3.3 -> libopencv_hdf3.so.3.3.1
-rw-r--r-- 1 root root 39456 11月 7 02:47 libopencv_hdf3.so.3.3.1
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_highgui3.so -> libopencv_highgui3.so.3.3
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_highgui3.so.3.3 -> libopencv_highgui3.so.3.3.1
-rw-r--r-- 1 root root 267208 11月 7 02:47 libopencv_highgui3.so.3.3.1
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_imgcodecs3.so -> libopencv_imgcodecs3.so.3.3
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_imgcodecs3.so.3.3 -> libopencv_imgcodecs3.so.3.3.1
-rw-r--r-- 1 root root 4277928 11月 7 02:47 libopencv_imgcodecs3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_img_hash3.so -> libopencv_img_hash3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_img_hash3.so.3.3 -> libopencv_img_hash3.so.3.3.1
-rw-r--r-- 1 root root 3284496 11月 7 02:47 libopencv_img_hash3.so.3.3.1
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_imgproc3.so -> libopencv_imgproc3.so.3.3
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_imgproc3.so.3.3 -> libopencv_imgproc3.so.3.3.1
-rw-r--r-- 1 root root 39353088 11月 7 02:47 libopencv_imgproc3.so.3.3.1
lrwxrwxrwx 1 root root 33 11月 7 02:47 libopencv_line_descriptor3.so -> libopencv_line_descriptor3.so.3.3
lrwxrwxrwx 1 root root 35 11月 7 02:47 libopencv_line_descriptor3.so.3.3 -> libopencv_line_descriptor3.so.3.3.1
-rw-r--r-- 1 root root 187896 11月 7 02:47 libopencv_line_descriptor3.so.3.3.1
lrwxrwxrwx 1 root root 20 11月 7 02:47 libopencv_ml3.so -> libopencv_ml3.so.3.3
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_ml3.so.3.3 -> libopencv_ml3.so.3.3.1
-rw-r--r-- 1 root root 749472 11月 7 02:47 libopencv_ml3.so.3.3.1
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_objdetect3.so -> libopencv_objdetect3.so.3.3
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_objdetect3.so.3.3 -> libopencv_objdetect3.so.3.3.1
-rw-r--r-- 1 root root 3601744 11月 7 02:47 libopencv_objdetect3.so.3.3.1
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_optflow3.so -> libopencv_optflow3.so.3.3
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_optflow3.so.3.3 -> libopencv_optflow3.so.3.3.1
-rw-r--r-- 1 root root 397232 11月 7 02:47 libopencv_optflow3.so.3.3.1
lrwxrwxrwx 1 root root 34 11月 7 02:47 libopencv_phase_unwrapping3.so -> libopencv_phase_unwrapping3.so.3.3
lrwxrwxrwx 1 root root 36 11月 7 02:47 libopencv_phase_unwrapping3.so.3.3 -> libopencv_phase_unwrapping3.so.3.3.1
-rw-r--r-- 1 root root 35360 11月 7 02:47 libopencv_phase_unwrapping3.so.3.3.1
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_photo3.so -> libopencv_photo3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_photo3.so.3.3 -> libopencv_photo3.so.3.3.1
-rw-r--r-- 1 root root 4043536 11月 7 02:47 libopencv_photo3.so.3.3.1
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_plot3.so -> libopencv_plot3.so.3.3
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_plot3.so.3.3 -> libopencv_plot3.so.3.3.1
-rw-r--r-- 1 root root 3231056 11月 7 02:47 libopencv_plot3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_reg3.so -> libopencv_reg3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_reg3.so.3.3 -> libopencv_reg3.so.3.3.1
-rw-r--r-- 1 root root 3345936 11月 7 02:47 libopencv_reg3.so.3.3.1
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_rgbd3.so -> libopencv_rgbd3.so.3.3
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_rgbd3.so.3.3 -> libopencv_rgbd3.so.3.3.1
-rw-r--r-- 1 root root 557200 11月 7 02:47 libopencv_rgbd3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_saliency3.so -> libopencv_saliency3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_saliency3.so.3.3 -> libopencv_saliency3.so.3.3.1
-rw-r--r-- 1 root root 195832 11月 7 02:47 libopencv_saliency3.so.3.3.1
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_shape3.so -> libopencv_shape3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_shape3.so.3.3 -> libopencv_shape3.so.3.3.1
-rw-r--r-- 1 root root 240320 11月 7 02:47 libopencv_shape3.so.3.3.1
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_stereo3.so -> libopencv_stereo3.so.3.3
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_stereo3.so.3.3 -> libopencv_stereo3.so.3.3.1
-rw-r--r-- 1 root root 141824 11月 7 02:47 libopencv_stereo3.so.3.3.1
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_stitching3.so -> libopencv_stitching3.so.3.3
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_stitching3.so.3.3 -> libopencv_stitching3.so.3.3.1
-rw-r--r-- 1 root root 602760 11月 7 02:47 libopencv_stitching3.so.3.3.1
lrwxrwxrwx 1 root root 34 11月 7 02:47 libopencv_structured_light3.so -> libopencv_structured_light3.so.3.3
lrwxrwxrwx 1 root root 36 11月 7 02:47 libopencv_structured_light3.so.3.3 -> libopencv_structured_light3.so.3.3.1
-rw-r--r-- 1 root root 121608 11月 7 02:47 libopencv_structured_light3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_superres3.so -> libopencv_superres3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_superres3.so.3.3 -> libopencv_superres3.so.3.3.1
-rw-r--r-- 1 root root 175176 11月 7 02:47 libopencv_superres3.so.3.3.1
lrwxrwxrwx 1 root root 34 11月 7 02:47 libopencv_surface_matching3.so -> libopencv_surface_matching3.so.3.3
lrwxrwxrwx 1 root root 36 11月 7 02:47 libopencv_surface_matching3.so.3.3 -> libopencv_surface_matching3.so.3.3.1
-rw-r--r-- 1 root root 286136 11月 7 02:47 libopencv_surface_matching3.so.3.3.1
lrwxrwxrwx 1 root root 22 11月 7 02:47 libopencv_text3.so -> libopencv_text3.so.3.3
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_text3.so.3.3 -> libopencv_text3.so.3.3.1
-rw-r--r-- 1 root root 409624 11月 7 02:47 libopencv_text3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_tracking3.so -> libopencv_tracking3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_tracking3.so.3.3 -> libopencv_tracking3.so.3.3.1
-rw-r--r-- 1 root root 2115336 11月 7 02:47 libopencv_tracking3.so.3.3.1
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_video3.so -> libopencv_video3.so.3.3
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_video3.so.3.3 -> libopencv_video3.so.3.3.1
-rw-r--r-- 1 root root 3609488 11月 7 02:47 libopencv_video3.so.3.3.1
lrwxrwxrwx 1 root root 25 11月 7 02:47 libopencv_videoio3.so -> libopencv_videoio3.so.3.3
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_videoio3.so.3.3 -> libopencv_videoio3.so.3.3.1
-rw-r--r-- 1 root root 163216 11月 7 02:47 libopencv_videoio3.so.3.3.1
lrwxrwxrwx 1 root root 27 11月 7 02:47 libopencv_videostab3.so -> libopencv_videostab3.so.3.3
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_videostab3.so.3.3 -> libopencv_videostab3.so.3.3.1
-rw-r--r-- 1 root root 347376 11月 7 02:47 libopencv_videostab3.so.3.3.1
lrwxrwxrwx 1 root root 21 11月 7 02:47 libopencv_viz3.so -> libopencv_viz3.so.3.3
lrwxrwxrwx 1 root root 23 11月 7 02:47 libopencv_viz3.so.3.3 -> libopencv_viz3.so.3.3.1
-rw-r--r-- 1 root root 394408 11月 7 02:47 libopencv_viz3.so.3.3.1
lrwxrwxrwx 1 root root 29 11月 7 02:47 libopencv_xfeatures2d3.so -> libopencv_xfeatures2d3.so.3.3
lrwxrwxrwx 1 root root 31 11月 7 02:47 libopencv_xfeatures2d3.so.3.3 -> libopencv_xfeatures2d3.so.3.3.1
-rw-r--r-- 1 root root 2879304 11月 7 02:47 libopencv_xfeatures2d3.so.3.3.1
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_ximgproc3.so -> libopencv_ximgproc3.so.3.3
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_ximgproc3.so.3.3 -> libopencv_ximgproc3.so.3.3.1
-rw-r--r-- 1 root root 1147448 11月 7 02:47 libopencv_ximgproc3.so.3.3.1
lrwxrwxrwx 1 root root 28 11月 7 02:47 libopencv_xobjdetect3.so -> libopencv_xobjdetect3.so.3.3
lrwxrwxrwx 1 root root 30 11月 7 02:47 libopencv_xobjdetect3.so.3.3 -> libopencv_xobjdetect3.so.3.3.1
-rw-r--r-- 1 root root 105160 11月 7 02:47 libopencv_xobjdetect3.so.3.3.1
lrwxrwxrwx 1 root root 24 11月 7 02:47 libopencv_xphoto3.so -> libopencv_xphoto3.so.3.3
lrwxrwxrwx 1 root root 26 11月 7 02:47 libopencv_xphoto3.so.3.3 -> libopencv_xphoto3.so.3.3.1
-rw-r--r-- 1 root root 3413520 11月 7 02:47 libopencv_xphoto3.so.3.3.1
It appeared that the OpenCV libraries in ROS Kinetic has updraded to 3.3.1 recently, and there is a compatibility problem with SVO binaries which tried to find 3.2 libraries.
I met some problems when installing svo on Odroid XU4 with ubuntu 14.04.1 LTS and ROS indigo. When I built the svo_install_overlay_ws by typing "catkin build", the following error information came out:
In file included from /home/odroid/svo_install_ws/install/include/svo/direct/matcher.h:12:0,
from /home/odroid/svo_install_ws/install/include/svo/direct/depth_filter.h:17,
from /home/odroid/svo_install_ws/install/include/svo/svo.h:9,
from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_factory.cpp:2:
/home/odroid/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
In file included from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_interface.h:11:0,
from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_node_base.h:3,
from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_node_base.cpp:1:
/home/odroid/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
In file included from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/svo_interface.h:11:0,
from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/svo_interface.cpp:1:
/home/odroid/svo_install_ws/install/include/svo/common/types.h:6:22: fatal error: Eigen/Core: No such file or directory
#include <Eigen/Core>
^
compilation terminated.
In file included from /home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/src/visualizer.cpp:6:0:
/home/odroid/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/include/svo_ros/visualizer.h:23:33: fatal error: pcl_ros/point_cloud.h: No such file or directory
#include <pcl_ros/point_cloud.h>
^
compilation terminated.
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o] Error 1
make[2]: *** [CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o] Error 1
make[2]: *** [CMakeFiles/svo_ros.dir/src/visualizer.cpp.o] Error 1
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
make: *** [all] Error 2
[svo_ros] <== '/home/odroid/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j' failed with return code '2'
Failed <== svo_ros [ 36.8 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
# Command to reproduce:
cd /home/odroid/svo_install_overlay_ws/build/svo_ros && /home/odroid/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
# Path to log:
cat /home/odroid/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
It seemed that this error connected to eigen, but I still don't know how to solve it.
The images from (TUM-VI dataset cannot be loaded with error Unknown image type 2!. It would be better if you could add support for "mono16" images as well.
Been trying to benchmark my odroid XU4 with SVO 2.0 and ran into some interesting problems with the camera drivers. It seems like a single camera driver was taking 100% of 1 core on the XU4, a second camera would then take another 100%.
few questions
Can you provide a screenshot of the top command from SVO running on the XU4?
Hi,
What kind of licencing do you plan on having for a potential commercialization? Do you plan on making the software opensource or are you having plans on monetization?
Do we have to synchronizer camera and imu topics?
If so,any suggestion how to do that??
I get some bad result after adding imu data(especially rotation).
Thank you for your assistance,
Johnson
Hi, I have SVO installed successfully and I am trying to use SVO 2.0.
Using the pdf steps attached in .zip, when I execute the command: ** catkin build **
I had the following problem:
[build] Found '1' packages in 0.0 seconds.
[build] Package table is up to date.
Starting >>> svo_ros
Errors << svo_ros:make /home/ubuntu/svo_install_overlay_ws/logs/svo_ros/build.make.000.log
make[2]: No rule to make target '/home/zichao/svo_install_ws/install/lib/libgflags.so', needed by '/home/ubuntu/svo_install_overlay_ws/devel/.private/svo_ros/lib/libsvo_ros.so'. Stop.
make[1]: [CMakeFiles/svo_ros.dir/all] Error 2
make: [all] Error 2
cd /home/ubuntu/svo_install_overlay_ws/build/svo_ros; catkin build --get-env svo_ros | catkin env -si /usr/bin/make --jobserver-fds=6,7 -j; cd -
..............................................................................................................
Failed << svo_ros:make [ Exited with code 2 ]
Failed <<< svo_ros [ 0.9 seconds ]
[build] Summary: 0 of 1 packages succeeded.
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: 1 packages failed.
[build] Runtime: 1.0 seconds total.
someone can help me?
I know it might be something related to the "zichao" paths. I already replace this word with "ubuntu", the name of my machine, in all files that contain this word, but did not solve.
Are there plans to release binaries for more CPU architectures? Or giving access to the source code so people could compile their own? Specifically I had been hoping to try to get binaries for the Nvidia Jetson TX2.
https://devblogs.nvidia.com/parallelforall/jetson-tx2-delivers-twice-intelligence-edge/
If you already cross compiled for the Odroid XU4 you probably have most of the work out of the way to compile for Armv8. The binaries from the XU4 would probably be helpful to some people as well.
Hi,
I am trying to install SVO 2.0 in Ubuntu 16.04 and kinetic.
After following the installation guidelines I get stuck in "catkin build".
I get an error:
_Scanning dependencies of target svo_ros
[ 11%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_interface.cpp.o
[ 22%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_factory.cpp.o
[ 33%] Building CXX object CMakeFiles/svo_ros.dir/src/svo_node_base.cpp.o
[ 44%] Building CXX object CMakeFiles/svo_ros.dir/src/visualizer.cpp.o
make[2]: *** No rule to make target '/home/bikram/svo_install_ws/install/lib/libgflags.so', needed by '/home/bikram/svo_install_overlay_ws/devel/lib/libsvo_ros.so'. Stop.
make[2]: *** Waiting for unfinished jobs....
CMakeFiles/Makefile2:416: recipe for target 'CMakeFiles/svo_ros.dir/all' failed
make[1]: *** [CMakeFiles/svo_ros.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[svo_ros] <== '/home/bikram/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
Failed <== svo_ros [ 15.4 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/bikram/svo_install_overlay_ws/build/svo_ros && /home/bikram/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
cat /home/bikram/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2_
Any idea what I am doing wrong?
Thanks
Bikram
I'm testing a setup with stereo fisheye cameras that are facing in mostly opposite directions, such that there is minimal overlap between their views. It never successfully initializes though, and the number of features is always around 0-40, with most of them in the overlapping region, and they don't look like good features, despite plenty of corners elsewhere in the scene. If I run with either camera alone as a mono setup, number of features is often 180+ (max_fts), and results look good as expected.
Is there some aspect of initialization with 2 cameras that requires points in the overlapping region?
If I decrease the init_min_* parameters down to around 40, it will always crash right after "Init: Selected first frame."
A similar issue was presented before. #5
When I run the SVO example (both with the fla_stereo_imu.bag provided and with my own stereo camera, and both on my laptop and Odroid XU4), there are some strange things that make me skeptical of the trajectory accuracy produced only by visual odometry.
As mentioned in #5 , though it tracks the position of the camera I get lots of: "seed sigma is nan!-0.338734, sq-nan, check-convergence = 0" and "critical". What does that mean?
I have considered the error as normal information before, which indicated that the depth filter try to reject some "wrong" estimated depths as they are not converged. But it seems that this error indicates an abnormal problem which can decrease the accuracy now as you mentioned to try to fix/suppress it. Have you found where the problem is? In the implementation or the depth filter algorithm itself?
Frequently the trajectory in RVIZ was not recorded as "continuous blue point arrays", especially in corridors or outdoors where fewer features are likely to be detected. When running SVO on odroid, sometimes even few blue points of trajectory was recorded and I can hardly see them. What I can see about the camera motion is only the moving coordinate axes indicating the current camera pose. I doubt that the trajectory recorded in RVIZ is the trajectory estimated using both image frames and IMU information while the moving coordinate frame with no "blue points" left is the motion with only IMU information? Or it is just a communication problem or a RVIZ computation resource occupancy problem?
These problem are of great concern. I'm quite worrying about the accuracy of the estimated trajectory the SVO example could reach, especially on Odroid XU4. Hope you can reply as soon as possible.
Hi . I am using a monocular camera. I move the camera in each three axes about 2meter but the change in topic /pose/camera is very less than 2meter(about 0.4). Should I scale this data by my self?
Hello everyone, I use SVO2 in stereo mode(without IMU). Here is my stereo camera calibration file:
cameras:
The T_B_C is not exactly calibrated. I can't launch stereo launch mode successfully, here is the display message:
[ INFO] [1538040939.943552164]: Found parameter: cam0_topic, value: /stereo/left/image_raw_rect
[ INFO] [1538040939.956717985]: Found parameter: cam1_topic, value: /stereo/right/image_raw_rect
[ INFO] [1538040943.766738950]: /stereo: Initializing reconfigure server
[ INFO] [1538040943.768499335]: camera calibration URL: file:///home/uavlab/.ros/camera_info/mv_26806343.yaml
[ INFO] [1538040943.881733856]: camera calibration URL: file:///home/uavlab/.ros/camera_info/mv_26806357.yaml
[ INFO] [1538040943.892050119]: DepthFilter: RESET.
[ INFO] [1538040943.892151203]: DepthFilter: RESET.
[ERROR] [1538040943.907436868]: Initialization failed. Not enough triangulated points.
[ERROR] [1538040943.959398021]: Initialization failed. Not enough triangulated points.
[ERROR] [1538040943.994905877]: Initialization failed. Not enough triangulated points.
[ERROR] [1538040944.054005901]: Initialization failed. Not enough triangulated points.
[ERROR] [1538040944.088357084]: Initialization failed. Not enough triangulated points.
[ERROR] [1538040944.124202692]: Initialization failed. Not enough triangulated points.
Could anyone help me? Thank you!!!
Hi.
Does SVO 2.0 work with ODROID XU4 with Ubuntu 16 and ROS Kinetic? If yes, are the provided binaries enough ? Are there any extra/different steps that need to be done?
Thanks.
Hi, I have downloaded the binaries of svo2.0 and installed in ubuntu16.04 followed the support file install.pdf. But when using catkin build to build svo_example after installed svo2.0 binaries, errors happened as flowing picture.

How can I solve this error? Thanks.
Hi, I use the default pinhole.yaml config file and test V101 dataset with my machine Intel® Core™ i5-4570 CPU @ 3.20GHz × 4 . Sometimes the estimator runs through to the end without tracking failed, sometimes, it cannot run to the end. For the first situation, I've got the below trajectory:

And for the latter situation, I got the below trajectory, with a big error:

scale: 2.650539
compared_pose_pairs 1651 pairs
absolute_translational_error.rmse 0.539003 m
absolute_translational_error.mean 0.464468 m
absolute_translational_error.median 0.451905 m
absolute_translational_error.std 0.273484 m
absolute_translational_error.min 0.101481 m
absolute_translational_error.max 1.536845 m
How can I improve the performance by tuning the parameters?
As a matter of fact, I notice in your paper that, your SVO2 program runs well on all EuRoC datasets. Shown as below chart:

Hello,
I created a custom stereo rig and have been trying to get svo running with it. However, when I run my svo launch file the camera feed never starts up and nothing ever happens, no errors are thrown as well. Is this an issue with my stereo calibration? If I run svo with just one camera everything works fine. The tracking and point cloud looks good. So my best guess is that my extrinsic calibration is off. I have been unable to figure how or why it is wrong though.
Below is my calibration file:
label: ps3eye_forward_stereo
cameras:
- camera:
label: /sync/camera_left/image_raw
line-delay-nanoseconds: 0
image_height: 480
image_width: 640
type: pinhole
intrinsics:
cols: 1
rows: 4
data: [527.304356770005, 528.376891316962, 301.042893012369, 204.555752801064]
distortion:
type: radial-tangential
parameters:
cols: 1
rows: 4
data: [-0.140531817851832, 0.120128496282672, 0., 0.]
T_B_C:
cols: 4
rows: 4
data: [ 1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0]
- camera:
label: /sync/camera_right/image_raw
line-delay-nanoseconds: 0
image_height: 480
image_width: 640
type: pinhole
intrinsics:
cols: 1
rows: 4
data: [513.739801237591, 514.58311771044, 315.651510398624, 216.259812471907]
distortion:
type: radial-tangential
parameters:
cols: 1
rows: 4
data: [-0.128165242708761, 0.138788351341635, 0., 0.]
T_B_C:
cols: 4
rows: 4
data: [ 0.999747545636243, 0.0204119840558797, 0.00939126728460886, 0.084301274586288,
-0.0205963617592674, 0.999588330104035, 0.0199739881372851, 0.000918644251837976,
-0.0089796924551922, -0.02016237155519, 0.999756392275979, 0.000457187443203893,
0.0, 0.0, 0.0, 1.0]
Here is my launch file:
<launch>
<arg name="cam_name" />
<arg name="calib_file" default="$(find svo_ros)/calib/ps3_stereo_calib.yaml"/>
<!-- SVO node -->
<node pkg="svo_ros" type="svo_node" name="svo" clear_params="true" output="screen">
<!-- Camera topic to subscribe to -->
<param name="cam0_topic" value="/sync/camera_left/image_raw" type="str" />
<param name="cam1_topic" value="/sync/camera_right/image_raw" type="str" />
<!-- Camera calibration file -->
<param name="calib_file" value="$(arg calib_file)" />
<!--Parameters-->
<rosparam file="$(find svo_ros)/param/ps3_stereo2.yaml" />
</node>
<!-- RVIZ + SVO GUI -->
<node name="vis" pkg="rviz" type="rviz" args=" -d $(find svo_ros)/rviz_config.rviz" />
<node name="svo_gui" pkg="rqt_gui" type="rqt_gui" args="-s rqt_svo.svo.Svo --args --topic svo" />
</launch>
Then I am using the same params as the euroc_stereo file but with use_imu = False.
Please let me know what you think the issue might be.
Thank you for your assistance,
Ryan
Hi,
Have you tried to update the seeds in exponential family?
Hi all,
I am curious about that can this package work with intel realsense R200 or ZR300 ?
Thanks in advance.
Found '1' packages in 0.0 seconds.
Starting ==> svo_ros
[svo_ros] ==> '/home/immo/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j' in '/home/immo/build/svo_ros'
[ 88%] Built target actionlib_msgs_generate_messages_nodejs
[ 88%] Built target topic_tools_generate_messages_py
[ 88%] Built target std_srvs_generate_messages_py
[ 88%] Built target tf2_msgs_generate_messages_py
[ 88%] Built target std_msgs_generate_messages_nodejs
[ 88%] Built target geometry_msgs_generate_messages_cpp
[ 88%] Built target actionlib_msgs_generate_messages_lisp
[ 88%] Built target nav_msgs_generate_messages_nodejs
[ 88%] Built target roscpp_generate_messages_py
[ 88%] Built target nodelet_generate_messages_py
[ 88%] Built target roscpp_generate_messages_cpp
[ 88%] Built target tf2_msgs_generate_messages_nodejs
[ 88%] Built target nav_msgs_generate_messages_py
[ 88%] Built target std_msgs_generate_messages_py
[ 88%] Built target dynamic_reconfigure_generate_messages_nodejs
[ 88%] Built target rosgraph_msgs_generate_messages_eus
[ 88%] Built target tf_generate_messages_lisp
[ 88%] Built target rosgraph_msgs_generate_messages_lisp
[ 88%] Built target pcl_msgs_generate_messages_nodejs
[ 88%] Built target std_srvs_generate_messages_nodejs
[ 88%] Built target geometry_msgs_generate_messages_py
[ 88%] Built target geometry_msgs_generate_messages_lisp
[ 88%] Built target bond_generate_messages_py
[ 88%] Built target std_srvs_generate_messages_lisp
[ 88%] Built target nodelet_generate_messages_lisp
[ 88%] Built target std_msgs_generate_messages_lisp
[ 88%] Built target tf_generate_messages_cpp
[ 88%] Built target actionlib_msgs_generate_messages_eus
[ 88%] Built target std_srvs_generate_messages_eus
[ 88%] Built target actionlib_generate_messages_lisp
[ 88%] Built target geometry_msgs_generate_messages_eus
[ 88%] Built target geometry_msgs_generate_messages_nodejs
[ 88%] Built target nodelet_generate_messages_cpp
[ 88%] Built target nav_msgs_generate_messages_lisp
[ 88%] Built target dynamic_reconfigure_generate_messages_lisp
[ 88%] Built target nodelet_generate_messages_nodejs
[ 88%] Built target actionlib_msgs_generate_messages_cpp
[ 88%] Built target sensor_msgs_generate_messages_eus
[ 88%] Built target actionlib_generate_messages_nodejs
[ 88%] Built target visualization_msgs_generate_messages_cpp
[ 88%] Built target bond_generate_messages_cpp
[ 88%] Built target rosgraph_msgs_generate_messages_nodejs
[ 88%] Built target roscpp_generate_messages_lisp
[ 88%] Built target bond_generate_messages_eus
[ 88%] Built target roscpp_generate_messages_eus
[ 88%] Built target bond_generate_messages_lisp
[ 88%] Built target nodelet_generate_messages_eus
[ 88%] Built target topic_tools_generate_messages_cpp
[ 88%] Built target topic_tools_generate_messages_eus
[ 88%] Built target rosgraph_msgs_generate_messages_cpp
[ 88%] Built target pcl_ros_gencfg
[ 88%] Built target pcl_msgs_generate_messages_eus
[ 88%] Built target tf2_msgs_generate_messages_eus
[ 88%] Built target actionlib_msgs_generate_messages_py
[ 88%] Built target visualization_msgs_generate_messages_lisp
[ 88%] Built target nav_msgs_generate_messages_eus
[ 88%] Built target visualization_msgs_generate_messages_nodejs
[ 88%] Built target sensor_msgs_generate_messages_cpp
[ 88%] Built target visualization_msgs_generate_messages_py
[ 88%] Built target std_msgs_generate_messages_cpp
[ 88%] Built target sensor_msgs_generate_messages_nodejs
[ 88%] Built target roscpp_generate_messages_nodejs
[ 88%] Built target rosgraph_msgs_generate_messages_py
[ 88%] Built target sensor_msgs_generate_messages_py
[ 88%] Built target actionlib_generate_messages_cpp
[ 88%] Built target tf_generate_messages_eus
[ 88%] Built target tf_generate_messages_py
[ 88%] Built target std_msgs_generate_messages_eus
[ 88%] Built target actionlib_generate_messages_eus
[ 88%] Built target actionlib_generate_messages_py
[ 88%] Built target tf2_msgs_generate_messages_cpp
[ 88%] Built target dynamic_reconfigure_generate_messages_py
[ 88%] Built target nav_msgs_generate_messages_cpp
[ 88%] Built target tf2_msgs_generate_messages_lisp
[ 88%] Built target dynamic_reconfigure_gencfg
[ 88%] Built target dynamic_reconfigure_generate_messages_cpp
[ 88%] Built target nodelet_topic_tools_gencfg
[ 88%] Built target pcl_msgs_generate_messages_lisp
[ 88%] Built target bond_generate_messages_nodejs
[ 88%] Built target visualization_msgs_generate_messages_eus
[ 88%] Built target dynamic_reconfigure_generate_messages_eus
[ 88%] Built target pcl_msgs_generate_messages_py
[ 88%] Built target pcl_msgs_generate_messages_cpp
[ 88%] Built target std_srvs_generate_messages_cpp
[ 88%] Built target topic_tools_generate_messages_lisp
[ 88%] Built target sensor_msgs_generate_messages_lisp
[ 88%] Built target tf_generate_messages_nodejs
[ 88%] Built target topic_tools_generate_messages_nodejs
[ 88%] Built target svo_ros
[ 88%] Built target svo_nodelet
[ 88%] Linking CXX executable /home/immo/devel/lib/svo_ros/svo_node
/home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::output_helper::publishQuadrocopterMarkers(ros::Publisher, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::cameras::NCamera::getCameraVector() const'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::base::CheckOpMessageBuilder::ForVar2()' /home/immo/devel/lib/libsvo_ros.so: undefined reference to google::base::CheckOpMessageBuilder::CheckOpMessageBuilder(char const*)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerArray::FrameHandlerArray(svo::BaseOptions const&, svo::DepthFilterOptions const&, svo::DetectorOptions const&, svo::InitializationOptions const&, svo::ReprojectorOptions const&, svo::FeatureTrackerOptions const&, std::shared_ptr<vk::cameras::NCamera> const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerBase::setRotationPrior(kindr::minimal::RotationQuaternionTemplate const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::feature_tracking_utils::getFeatureMatches(svo::Frame const&, svo::Frame const&, std::vector<std::pair<unsigned long, unsigned long>, std::allocator<std::pair<unsigned long, unsigned long> > >*)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerBase::~FrameHandlerBase()'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to vtable for svo::FrameHandlerStereo' /home/immo/devel/lib/libsvo_ros.so: undefined reference to fLI::FLAGS_v'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::ImuHandler(svo::ImuCalibration const&, svo::ImuInitialization const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::loadInitializationFromFile(std::__cxx11::basic_string<char, std::char_traits, std::allocator > const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::InitVLOG3__(int**, int*, char const*, int)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::feature_detection_utils::drawFeatures(svo::Frame const&, unsigned long, bool, cv::Mat*)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::base::CheckOpMessageBuilder::~CheckOpMessageBuilder()' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::~ImuHandler()'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::output_helper::publishCameraMarker(ros::Publisher, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::cameras::NCamera::loadFromYaml(std::__cxx11::basic_string<char, std::char_traits, std::allocator > const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::getRelativeRotationPrior(double, double, bool, kindr::minimal::RotationQuaternionTemplate<double>&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::addImuMeasurement(svo::ImuMeasurement const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::output_helper::publishPointMarker(ros::Publisher, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, ros::Duration)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerBase::addImageBundle(std::vector<cv::Mat, std::allocatorcv::Mat > const&, unsigned long)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::InitGoogleLogging(char const*)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to google::ParseCommandLineFlags(int*, char***, bool)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to vtable for svo::FrameHandlerMono' /home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessageFatal::LogMessageFatal(char const*, int, google::CheckOpString const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessage::LogMessage(char const*, int)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerBase::setRotationIncrementPrior(kindr::minimal::RotationQuaternionTemplate const&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerStereo::FrameHandlerStereo(svo::BaseOptions const&, svo::DepthFilterOptions const&, svo::DetectorOptions const&, svo::InitializationOptions const&, svo::StereoTriangulationOptions const&, svo::ReprojectorOptions const&, svo::FeatureTrackerOptions const&, std::shared_ptr<vk::cameras::NCamera> const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to google::InstallFailureSignalHandler()'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::loadCalibrationFromFile(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to vtable for svo::FrameHandlerArray'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerMono::FrameHandlerMono(svo::BaseOptions const&, svo::DepthFilterOptions const&, svo::DetectorOptions const&, svo::InitializationOptions const&, svo::ReprojectorOptions const&, svo::FeatureTrackerOptions const&, std::shared_ptr<vk::cameras::NCamera> const&)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::output_helper::publishFrameMarker(ros::Publisher, Eigen::Matrix<double, 3, 3, 0, 3, 3> const&, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, std::__cxx11::basic_string<char, std::char_traits, std::allocator > const&, ros::Time const&, int, int, double, ros::Duration)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessageFatal::~LogMessageFatal()' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::ImuHandler::getInitialAttitude(double, kindr::minimal::RotationQuaternionTemplate&) const'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::base::CheckOpMessageBuilder::NewString[abi:cxx11]()' /home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessage::~LogMessage()'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::kLogSiteUninitialized' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::frame_utils::createImgPyramid(cv::Mat const&, int, std::vector<cv::Mat, std::allocatorcv::Mat >&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessage::stream()' /home/immo/devel/lib/libsvo_ros.so: undefined reference to vk::output_helper::publishTfTransform(kindr::minimal::QuatTransformationTemplate const&, ros::Time const&, std::__cxx11::basic_string<char, std::char_traits, std::allocator > const&, std::__cxx11::basic_string<char, std::char_traits, std::allocator > const&, tf::TransformBroadcaster&)'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to google::LogMessageFatal::LogMessageFatal(char const*, int)' /home/immo/devel/lib/libsvo_ros.so: undefined reference to svo::FrameHandlerBase::closeKeyframes() const'
/home/immo/devel/lib/libsvo_ros.so: undefined reference to `svo::ImuHandler::getMeasurements(double, double, bool, std::deque<svo::ImuMeasurement, std::allocatorsvo::ImuMeasurement >&)'
collect2: error: ld returned 1 exit status
CMakeFiles/svo_node.dir/build.make:539: recipe for target '/home/immo/devel/lib/svo_ros/svo_node' failed
make[2]: *** [/home/immo/devel/lib/svo_ros/svo_node] Error 1
CMakeFiles/Makefile2:155: recipe for target 'CMakeFiles/svo_node.dir/all' failed
make[1]: *** [CMakeFiles/svo_node.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[svo_ros] <== '/home/immo/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j' failed with return code '2'
Failed <== svo_ros [ 1.7 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/immo/build/svo_ros && /home/immo/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,5 -j; cd -
cat /home/immo/build/build_logs/svo_ros.log
Exited with return code: 2
[build] Runtime: 1.7 seconds
`
Any advise would be highly appreciated!
Hey guys,
I am trying to install SVO2.0 + MSF as the installation.pdf.but I found the binaries is different from what you provided.The binaries file you provided is svo_install_ws, the install.md shows svo_msf_ws.I am confused about this, whether the two binary files are the same.
Thank you for your assistance.
I'm using Ubuntu 16.04 with Ros Kinetic. SVO is not able to initialize on the ICL-NUIM Living Room without noise. My calibration file is:
cameras:
camera:
distortion:
parameters:
cols: 1
rows: 4
#data: [0.751875, 1.000000, 0.500000, 0.500000]
data: [0.0, 0.0, 0.0, 0.0]
type: radial-tangential
image_height: 480
image_width: 640
intrinsics:
cols: 1
rows: 4
data: [481.2, -480.0 , 319.5, 239.5]
label: cam
line-delay-nanoseconds: 0
type: pinhole
T_B_C:
cols: 4
rows: 4
data: [1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1]
label: camera
I have found a solution on uzh-rpg/rpg_svo#87 where it is solved when they put a minus before 'dy' on line 140 in sparse_img_align.cpp. But I do not have the source codes I only have the binaries. Do you have any solution?
Thanks in advance.
Hi, I'm trying to build on ARM and keep running into the following errors:
[ 66%] Building CXX object CMakeFiles/svo_node.dir/src/svo_node.cpp.o
[ 77%] Building CXX object CMakeFiles/svo_nodelet.dir/src/svo_nodelet.cpp.o
[ 88%] Linking CXX executable /home/odroid/svo_install_overlay_ws/devel/lib/svo_ros/svo_node
[100%] Linking CXX shared library /home/odroid/svo_install_overlay_ws/devel/lib/libsvo_nodelet.so
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::output_helper::publishTfTransform(kindr::minimal::QuatTransformationTemplate<double> const&, ros::Time const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, tf::TransformBroadcaster&)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `svo::ImuHandler::loadInitializationFromFile(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::output_helper::publishCameraMarker(ros::Publisher, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `cv::imshow(std::string const&, cv::_InputArray const&)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `ros::console::initializeLogLocation(ros::console::LogLocation*, std::string const&, ros::console::levels::Level)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `ros::console::print(ros::console::FilterBase*, void*, ros::console::levels::Level, std::basic_stringstream<char, std::char_traits<char>, std::allocator<char> > const&, char const*, int, char const*)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `YAML::ostream_wrapper::write(std::string const&)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::output_helper::publishPointMarker(ros::Publisher, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, ros::Duration)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `YAML::Emitter::Write(std::string const&)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `svo::ImuHandler::loadCalibrationFromFile(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `YAML::LoadFile(std::string const&)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `YAML::detail::node_data::set_scalar(std::string const&)'
/home/odroid/svo_install_ws/install/lib/libvikit_cameras.so: undefined reference to `cv::imread(std::string const&, int)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::output_helper::publishQuadrocopterMarkers(ros::Publisher, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&)'
/home/odroid/svo_install_ws/install/lib/libvikit_common.so: undefined reference to `cv::Exception::Exception(int, std::string const&, std::string const&, std::string const&, int)'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::cameras::NCamera::loadFromYaml(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)'
/home/odroid/svo_install_ws/install/lib/libsvo.so: undefined reference to `YAML::Emitter::PrepareIntegralStream(std::basic_stringstream<char, std::char_traits<char>, std::allocator<char> >&) const'
/home/odroid/svo_install_ws/install/lib/libvikit_cameras.so: undefined reference to `YAML::detail::node_data::empty_scalar'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `google::base::CheckOpMessageBuilder::NewString[abi:cxx11]()'
/home/odroid/svo_install_overlay_ws/devel/lib/libsvo_ros.so: undefined reference to `vk::output_helper::publishFrameMarker(ros::Publisher, Eigen::Matrix<double, 3, 3, 0, 3, 3> const&, Eigen::Matrix<double, 3, 1, 0, 3, 1> const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, ros::Time const&, int, int, double, ros::Duration)'
collect2: error: ld returned 1 exit status
CMakeFiles/svo_node.dir/build.make:653: recipe for target '/home/odroid/svo_install_overlay_ws/devel/lib/svo_ros/svo_node' failed
make[2]: *** [/home/odroid/svo_install_overlay_ws/devel/lib/svo_ros/svo_node] Error 1
CMakeFiles/Makefile2:284: recipe for target 'CMakeFiles/svo_node.dir/all' failed
make[1]: *** [CMakeFiles/svo_node.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
[100%] Built target svo_nodelet
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
[svo_ros] <== '/home/odroid/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j' failed with return code '2'
Failed <== svo_ros [ 2 minutes and 0.1 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
# Command to reproduce:
cd /home/odroid/svo_install_overlay_ws/build/svo_ros && /home/odroid/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/make --jobserver-fds=3,4 -j; cd -
# Path to log:
cat /home/odroid/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 2
[build] Runtime: 2 minutes and 0.4 seconds I know the relevant libraries are installed on the system. I'm using the odroid XU4, the same processor that the demo was done on, with the armv71 architecture.
HI,I tried to install the SVO2.0 as the installation.pdf.
but when I excute the command:"catkin build" I would get this following problem.
I have modified the fix_path(remove the "zichao" to my own path)
In fact when I excute the ./fix_path it will shows"grep: install/include/opengv/test:nor this files or folder"
[build] Found '1' packages in 0.0 seconds.
[build] Package table is up to date.
Starting >>> svo_ros
Errors << svo_ros:cmake /home/aero/svo_install_overlay_ws/logs/svo_ros/build.cmake.001.log
CMake Error at /home/aero/svo_install_overlay_ws/src/rpg_svo_example/svo_ros/CMakeLists.txt:4 (find_package):
By not providing "Findcatkin_simple.cmake" in CMAKE_MODULE_PATH this
project has asked CMake to find a package configuration file provided by
"catkin_simple", but CMake did not find one.
Could not find a package configuration file provided by "catkin_simple"
with any of the following names:
catkin_simpleConfig.cmake
catkin_simple-config.cmake
Add the installation prefix of "catkin_simple" to CMAKE_PREFIX_PATH or set
"catkin_simple_DIR" to a directory containing one of the above files. If
"catkin_simple" provides a separate development package or SDK, be sure it
has been installed.
cd /home/aero/svo_install_overlay_ws/build/svo_ros; catkin build --get-env svo_ros | catkin env -si /usr/bin/cmake /home/aero/svo_install_overlay_ws/src/rpg_svo_example/svo_ros --no-warn-unused-cli -DCATKIN_DEVEL_PREFIX=/home/aero/svo_install_overlay_ws/devel/.private/svo_ros -DCMAKE_INSTALL_PREFIX=/home/aero/svo_install_overlay_ws/install -DCMAKE_BUILD_TYPE=Release; cd -
...............................................................................
Failed << svo_ros:cmake [ Exited with code 1 ]
Failed <<< svo_ros [ 0.2 seconds ]
[build] Summary: 0 of 1 packages succeeded.
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: 1 packages failed.
[build] Runtime: 0.3 seconds total.
Does it mean that the camera should look forward?
Hi,
I'm trying to use SVO stereo on KITTI dataset. I changed launch, calib and params files but I don't know how to write T_B_C. Which units should I use?
It's KITTI hardware setup: http://www.cvlibs.net/datasets/kitti/images/setup_top_view.png
Can you guys can help me?
During test I always get this message:
[ INFO] [1506685381.758927285]: Stereo: Triangulated 48 features,127 failed.
[ERROR] [1506685381.759024257]: Initialization failed. Not enough triangulated points.
What does it mean?
Thanks for your help!
Best Regards
Nickhodem
I am having trouble installing in TX2. Has anyone else tried doing it?
Here is the error I am getting:
Failed <== svo_ros [ 2.4 seconds ]
[build] There were '1' errors:
Failed to build package 'svo_ros' because the following command:
cd /home/nvidia/svo_install_overlay_ws/build/svo_ros && /home/nvidia/svo_install_overlay_ws/build/svo_ros/build_env.sh /usr/bin/cmake /home/nvidia/svo_install_overlay_ws/src/rpg_svo_example/svo_ros -DCATKIN_DEVEL_PREFIX=/home/nvidia/svo_install_overlay_ws/devel -DCMAKE_INSTALL_PREFIX=/home/nvidia/svo_install_overlay_ws/install -DCMAKE_BUILD_TYPE=Release; cd -
cat /home/nvidia/svo_install_overlay_ws/build/build_logs/svo_ros.log
Exited with return code: 1
Hey guys,
I am currently trying to integrate SVO 2.0 in a mapping framework for testing. However I run into problems copying the mono example interface provided (I use my own interface, because it suits my needs better). The following code snippet is used for construction:
_cam = vk::cameras::NCamera::loadFromYaml("/valid/path/to/calib.yaml");
std::cout << "loaded " << _cam->numCameras() << " cameras";
for(const auto& cam : _cam->getCameraVector())
cam->printParameters(std::cout, "");
// Init VO
svo::FrameHandlerMono::Ptr _slam =
std::make_shared<svo::FrameHandlerMono>(
loadBaseOptions(),
loadDepthFilterOptions(),
loadDetectorOptions(),
loadInitializationOptions(),
loadReprojectorOptions(),
loadTrackerOptions(),
_cam);
svo::Transformation T_world_imuinit(
Eigen::Quaterniond(1.0, 0.0, 0.0, 0.0),
Eigen::Vector3d(0.0, 0.0, 0.0));
_slam->setInitialImuPose(T_world_imuinit);
_slam->start();
The camera is read and printed correctly, however directly after creation as well the map as the depth filter are destructed. I copied all parameters and compared them with the ones in the example. The only difference I currently see, is that I don't establish a visualization, because it gets handled from my own framework.
Any suggestions what to try here, or in what cases such behaviour might occure?
Thanks and best regards,
Alex
Currently to run a lot of ros built in systems /odom needs to be published in addition to TF. Could the live position and velocity estimate be published there as well? The velocity is the important part I am looking for.
Explanation can be seen here
The navigation stack uses tf to determine the robot's location in the world and relate sensor data to a static map. However, tf does not provide any information about the velocity of the robot. Because of this, the navigation stack requires that any odometry source publish both a transform and a nav_msgs/Odometry message over ROS that contains velocity information. This tutorial explains the nav_msgs/Odometry message and provides example code for publishing both the message and transform over ROS and tf respectively.
Firstly, thank you for updating the launch files and parameters for EuRoC datasets. I ran the mono+imu mode following your instructions described in the doc/euroc.md. I got the below 3d trajectories with a big error drift in EuRoC V101 and V102 datasets.

v101 3d trajectory

v102 3d trajectory
So I want to know whether my EuRoC testes are good or not ? To a certain extent, maybe I guess the mono+imu mode cannot handle this kind of forward-looking situation very well if I want to get a small drift within a certain range.
I am working with 2 fisheye cameras and trying to run stereo SVO. SVO crashes after only a few seconds with the below error. The issue does not necessarily happen at the same time in my bag file.
F0204 16:55:15.496071 5228 angle-axis-inl.h:112] Check failed: (axis.squaredNorm()) <= (static_cast<Scalar>(1.0))+(static_cast<Scalar>(1e-4)) (-nan vs. 1.0001)
*** Check failure stack trace: ***
@ 0x7f243965b304 google::LogMessage::Fail()
@ 0x7f243965b248 google::LogMessage::SendToLog()
@ 0x7f243965ab84 google::LogMessage::Flush()
@ 0x7f243965e6ab google::LogMessageFatal::~LogMessageFatal()
@ 0x7f243e51c9f0 kindr::minimal::AngleAxisTemplate<>::setAxis()
@ 0x7f243e51a93c svo::Matcher::scanEpipolarUnitSphere()
@ 0x7f243e51bfff svo::Matcher::findEpipolarMatchDirect()
@ 0x7f243e521106 svo::depth_filter_utils::updateSeed()
@ 0x7f243e52463a svo::DepthFilter::updateSeeds()
@ 0x7f243e9ad970 svo::FrameHandlerStereo::makeKeyframe()
@ 0x7f243e9b2da6 svo::FrameHandlerStereo::processFrame()
@ 0x7f243e9c7d78 svo::FrameHandlerBase::addFrameBundle()
@ 0x7f243e9c8d50 svo::FrameHandlerBase::addImageBundle()
@ 0x7f2440e52c1c svo::SvoInterface::stereoCallback()
@ 0x7f2440e5ed98 boost::detail::function::void_function_obj_invoker9<>::invoke()
@ 0x7f2440e6dab9 boost::function9<>::operator()()
@ 0x7f2440e6e169 message_filters::CallbackHelper9T<>::call()
@ 0x7f2440e683b8 message_filters::sync_policies::ExactTime<>::checkTuple()
@ 0x7f2440e6a669 message_filters::Synchronizer<>::cb<>()
@ 0x7f2440e67722 image_transport::SubscriberFilter::cb()
@ 0x7f2428ceba89 image_transport::RawSubscriber::internalCallback()
@ 0x7f243ec8ca7c boost::detail::function::void_function_obj_invoker1<>::invoke()
@ 0x7f2428cf3613 ros::SubscriptionCallbackHelperT<>::call()
@ 0x7f24411eb44d ros::SubscriptionQueue::call()
@ 0x7f2441191210 ros::CallbackQueue::callOneCB()
@ 0x7f2441192683 ros::CallbackQueue::callAvailable()
@ 0x7f2440e558db svo::SvoInterface::stereoLoop()
@ 0x7f2440b57510 (unknown)
@ 0x7f243f3f06ba start_thread
@ 0x7f24405c141d clone
@ (nil) (unknown)
Here is the bag file I recorded and have been using for debugging
https://drive.google.com/file/d/19wk18eWXSzaSYfriFq7O1hxZRlqIbhti/view?usp=sharing
Here is a video of RVIZ running with the bag file
https://www.youtube.com/watch?v=haNSmDuULG4
From the launch file
<node pkg="svo_ros" type="svo_node" name="svo" clear_params="true" output="screen" required="true">
<!-- Camera and IMU topics to subscribe to -->
<param name="cam1_topic" value="/left/image_raw" type="str" />
<param name="cam0_topic" value="/right/image_raw" type="str" />
<param name="calib_file" value="$(find svo_ros)/calib/fisheyeTry2.yaml" type="str" />
<rosparam file="$(find svo_ros)/param/stereo_fisheye.yaml" />
</node>
The parameters, calibration, and masks are all here
https://github.com/asgard-mqp/rpg_svo_example
The parameters in particular, I had to hack together euroc_stereo and fisheye so help there would be appreciated.
https://github.com/asgard-mqp/rpg_svo_example/blob/master/svo_ros/param/stereo_fisheye.yaml
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
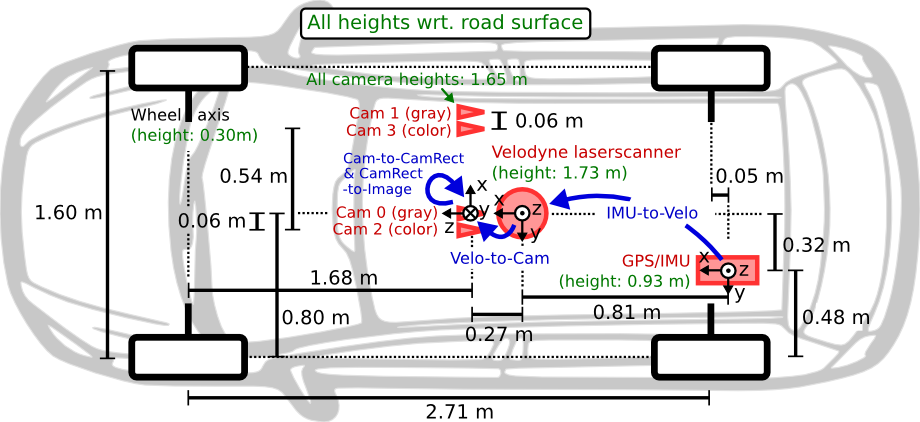{kind=link}