Sandwich is a small and versatile robot, powered by Jetson Nano and a Raspberry Pi PICO. It has 2 DC motors and a Raspberry Camera on the front.
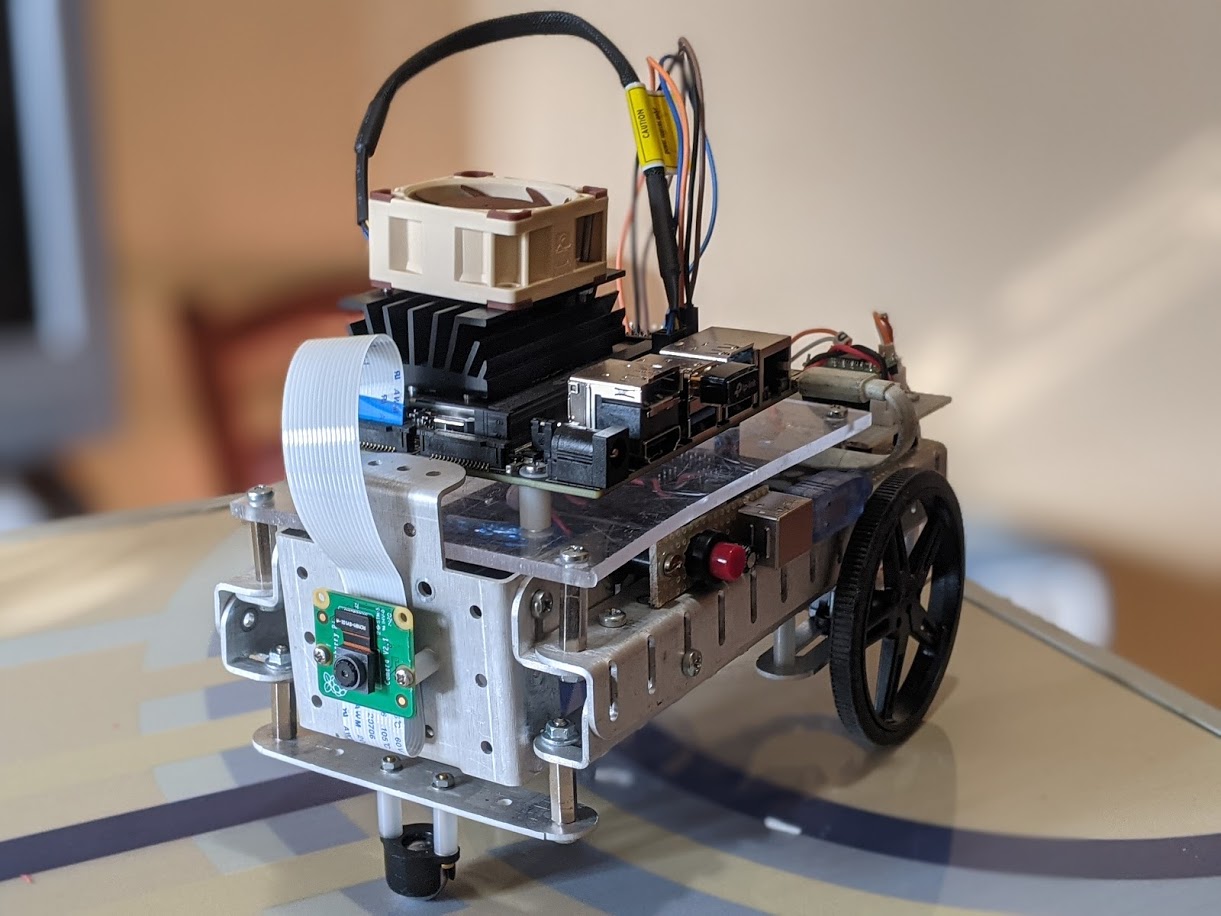
- NVIDIA Jetson Nano
- Raspberry Pi Pico-based custom board
- 10.000mAh power bank
- Raspberry Camera v2.1 for autonomous driving
- 2x Pololu Micro gear motors
Sandwich can operate autonomously in different modes. At any time, a custom web-based GUI named (of course) Bacon is always continuously hosted on the robot and can be used to monitor the camera and control the robot.
- Sandwich uses a fully connected network, resnet18, trained on the SUN RGB-D dataset (the model is provided by the jetson-inference package) to avoid obstacles. The network runs on the NVIDIA Jetson Nano’s GPU and performs a pixel-level classification of the image (semantic segmentation). The pixels classified as “floor” are considered free and thus safe space. A custom node reads the output of the network, and by computing the centroid of the floor pixels, which is used as a reference direction, and the total forward clearance, used as an indication of the front obstacle’s distance, can compute linear and angular velocity to avoid obstacles.
-
In this mode, Sandwich runs the AprilTag Detection Algorithm to detect and compute the pose of a printed tag. Once acquired, the tag position and orientation are used to set a navigation goal, which will be followed by the robot using a custom Lyapunov control. Basically, it tries to arrive in front of the tag in a perpendicular direction to the tag itself.
- Sandwich uses a fine-tuned DetectNet-COCO-Bottle network to detect beer bottles (actually any type of bottle can work) and follow them. It’s a simple script that uses the angular and linear velocity to center and regulates the size of a bottle in the image acquired by the camera.
This is the main workspace, the code is splitted in three different packages:
- is the main package that contains the motor control node, URDF file and launch files to configure the camera stream.
- contains the webpage that runs Bacon, a script and a roslaunch file to bring up the web server.
- contains all the nodes that give sandwich autonomous capability. The apriltag pose control, the obstacle avoidance and the beer follower, along with the roslaunch file needed.
This is the Raspberry PI Pico code. It uses the UART library and listens for messages from the node running on the Jetson. The character 's' is used as a start flag, and the velocity for each motor is encoded as a signed int8. The Pico only listens, except when it recieves message that doesn't start with the start character. In this case the Pico send back a warn message that will be logged as a warning in the ROS console.
Sandwich is built over an old robotic kit named Axemblo, now it isn't for sale anymore, but it similar, at least on the idea, to the MakeBlock. All the parts are made in aluminum and held together by M3 screws. On the lower part, between the aluminum racks, is the battery, a 10.000 power bank from INUI capable of providing 3A of current. In the back is the custom board based on a Raspberry Pi PICO, which is connected to the Jetson Nano over UART.
| Component | Distributor |
|---|---|
| Jetson NANO Developer Kit | Arrow |
| Raspberry PI Camera | Amazon.it |
| Powerbank | Amazon.it |
| Wifi USB adapter | Amazon.it |
| Pololu MicroGear Motors (2x) | Pololu.com |
| Motor Driver TB6612FNG module | Pololu.com |
| Raspberry Pi PICO | Melopero.com |
| MicroSD card 64GB | Amazon.it |
| Noctua NF-A4x20 5V FAN | Amazon.it |
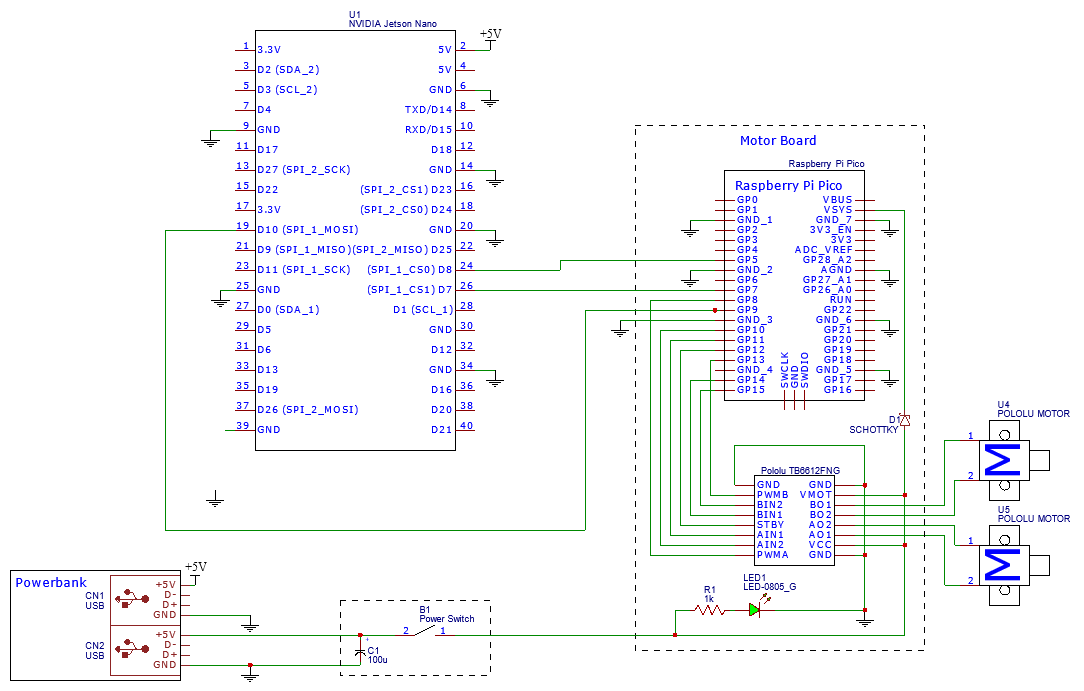
Currently, the robot runs with ROS melodic. A custom node reads the /cmd_vel topic, computes the velocity of every motor, and sends all the information to the Pico. A simple program written in C runs on the Pico, which receives the desired motor speed and drives the h-bridge using PWM. The web GUI is based on rosbridge_suite and the rosjs library; it is capabe of controlling the robot using a joystick and visualizing the camera stream; either on desktop or mobile devices.
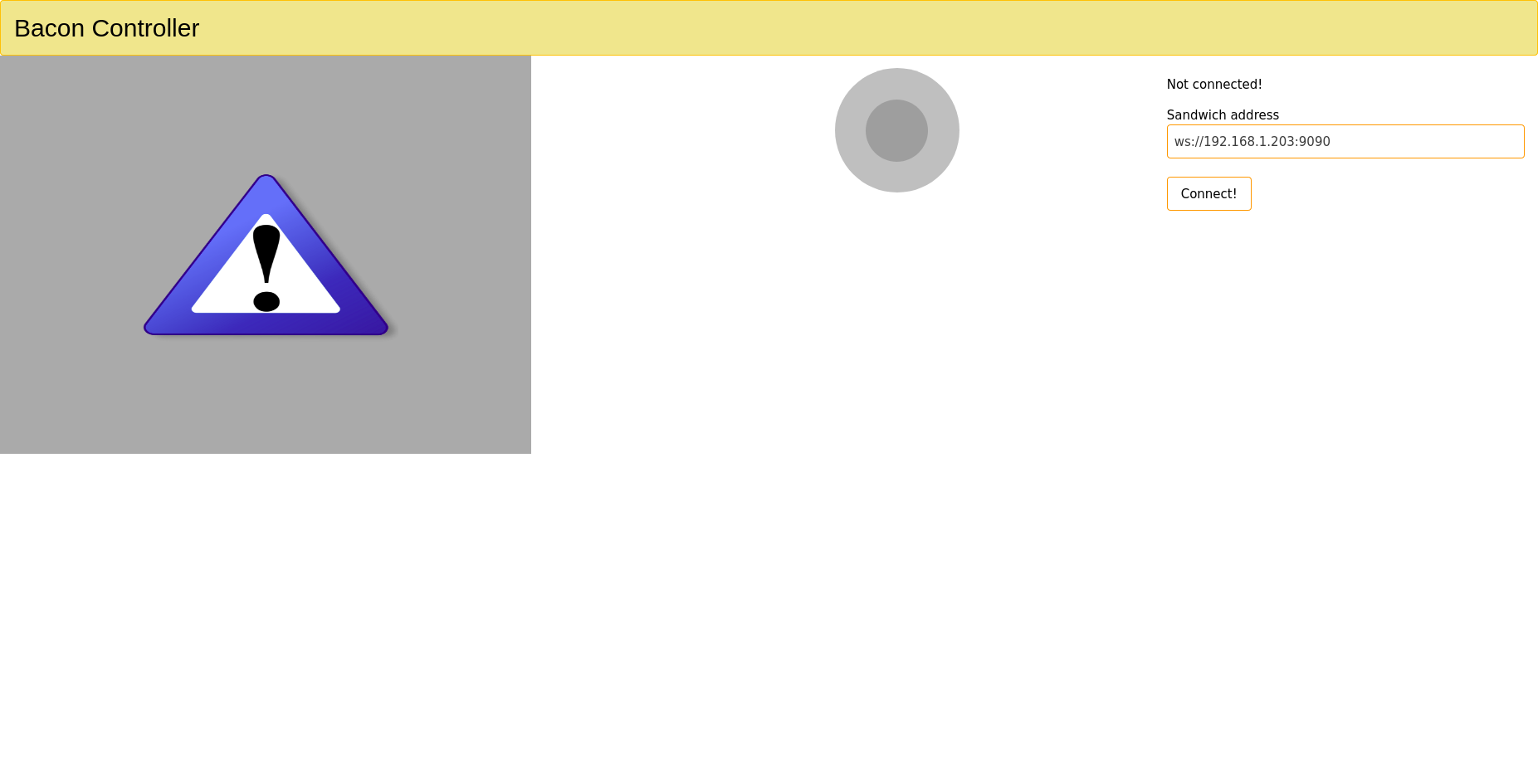
The camera stream is achieved using a couple of nodes on the Jetson. First there is the video_source node from the ros_deep_learning package provided by NVIDIA. It acquires the camera and publish the raw images on the video_source/raw topic. The web_video_server node, then, opens the stream on the 11315 port. On the GUI web page the stream is loaded as an image, using the url of the video stream provided by the server and the correct topic, that is something like
<img src="http://robot_address:11315/stream?topic=/video_source/raw&width=800&height=600&quality=50"/>A simple javascript function which read the textbox containing the robot address and load the stream is called when pressed the "start camera" button
// load the camera stream as an image, with the right IP address (from the wp_address input box)
//port 11315 and topic /video_source/raw are fixed.
//TODO: make port, topic and parameters dynamic via input boxes
loadCamera = function(){
document.getElementById('cam').innerHTML = '<img src="http://' + app.ws_address.slice(5,-5) + ':11315/stream?topic=/video_source/raw&width=800&height=600&quality=50" class="w3-image"/>';
app.cstarted = true; //"started" flag for change the button appereance
}To control the motors, Bacon uses rosjs library together with a nipple.js script. The joystick is based on a tutorial from "msadowski" that you can find here. The webpage make also use of Vue js to better link evey action to the html elements.






