ros-acceleration / community Goto Github PK
View Code? Open in Web Editor NEWROS 2 Hardware Acceleration Working Group community governance model & list of projects
ROS 2 Hardware Acceleration Working Group community governance model & list of projects
































































Goal of this ticket is to merge upstream acceleration kernels in two forms a) binaries (bitstream) and b) source code, so that users can leverage them directly from their computational graphs in a simplified manner.
Candidate: image_pipeline
NOTE: This ticket has moved to https://github.com/robotperf.
This ticket tracks the progress of the RobotPerf subproject of the ROS 2 Hardware Acceleration Working Group. Content will be updated as we progress. In time, a repository will branch out of this effort and to its own organization containing additional resources. Expectation however should be for the initial discussion to remain in here for organizational purposes. You can send feedback about this and/or participate by contacting here.
RobotPerf projectGoal: Design and develop a reference benchmarking suite that is used to evaluate robotics computing performance with ROS 2.
RobotPerf also aims to become a consortium of robotics leaders from academia, research labs, and industry whose mission is to build fair and useful robotics benchmarks that are technology agnostic, vendor-neutral and provide unbiased evaluations of robotics computing performance for hardware, software, and services—all conducted under prescribed conditions.
Benchmarking is the act of running a computer program with a known workload to assess the program's relative performance. In the context of ROS 2, performance information can help roboticists design more efficient robotic systems and select the right hardware for their robotic application. It can also help understand the trade-offs between different algorithms that implement the same capability, and help them choose the best approach for their use case. Performance data can also be used to compare different versions of ROS 2 and to identify regressions. Finally, performance information can be used to help prioritize future development efforts.
The myriad combinations of robot hardware and robotics software make assessing robotic-system performance in an architecture-neutral, representative, and reproducible manner challenging. RobotPerf attempts to provide a reference benchmarking suite that is used to evaluate robotics computing performance built with ROS 2.
Robot behaviors take the form of computational graphs, with data flowing between computation Nodes, across physical networks (communication buses) and while mapping to underlying sensors and actuators. The popular choice to build these computational graphs for robots these days is the Robot Operating System (ROS)1, a framework for robot application development. ROS enables you to build computational graphs and create robot behaviors by providing libraries, a communication infrastructure, drivers and tools to put it all together. Most companies building real robots today use ROS or similar event-driven software frameworks. ROS is thereby the common language in robotics, with several hundreds of companies and thousands of developers using it everyday. ROS 2 2 was redesigned from the ground up to address some of the challenges in ROS and solves many of the problems in building reliable robotics systems.
ROS 2 presents a modern and popular framework for robot application development most silicon vendor solutions support, and with a variety of modular packages, each implementing a different robotics feature that simplifies performance benchmarking in robotics.
The project is open to sponsorships and collaborations. For sponsoring the RobotPerf project contact here.
(to be described)
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T., Leibs, J., ... & Ng, A. Y. (2009, May). ROS: an open-source Robot Operating System. In ICRA workshop on open source software (Vol. 3, No. 3.2, p. 5). ↩
Macenski, S., Foote, T., Gerkey, B., Lalancette, C., & Woodall, W. (2022). Robot Operating System 2: Design, architecture, and uses in the wild. Science Robotics, 7(66), eabm6074. ↩
Originally posted by @soufien-gdaim in #1 (comment)
Hi all,
I have the same error when I tried the Emulation SW, and I didn't understood how can I solve this error even after I read your comments. so can you please tell me how can I solve this error. To built this project I use Vitis 2020.2, petalinux 2020.2 with zc702 card (zynq7000).
With another project (Zybo7, I download the a prebuilt project), I didn't have problems, I can do Emulation sw, Emulation hw and hardware without any problems.
Attached are the Vitis capture
.
An extension for colcon-core to include Hardware Acceleration capabilities and simplify acceleration flows. Initially targeting the following mechanisms:
This ticket tracks the progress of the Robotics MCU subproject of the ROS 2 Hardware Acceleration Working Group. Content will be updated as we progress. In time, a repository will branch out of this effort containing additional resources. Expectation however should be for the initial discussion to remain in here for organizational purposes. You can send feedback about this and/or participate by contacting here.
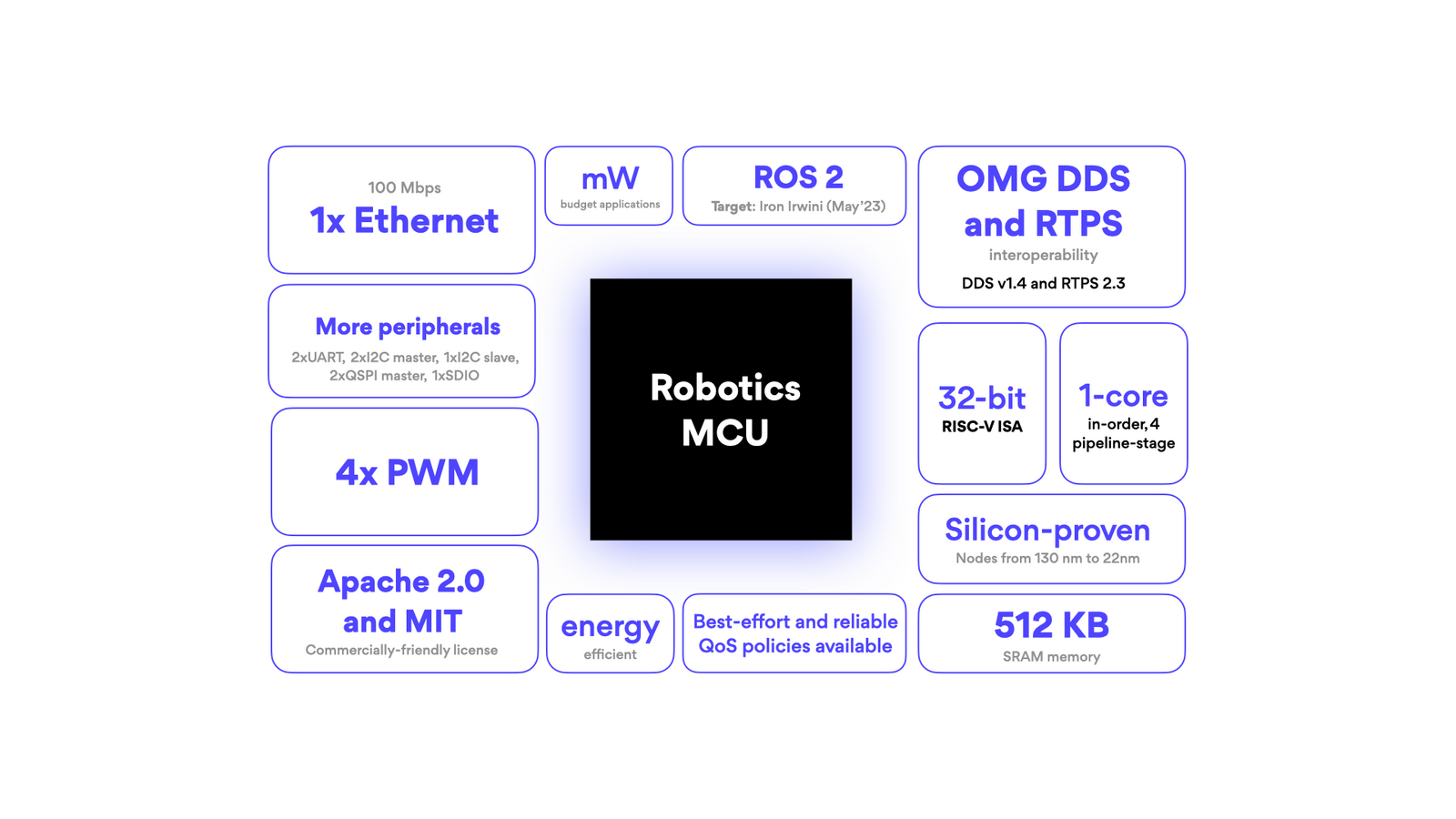
Robotics MCU projectGoal: Design and develop an open source software and hardware robotics microcontroller unit (Robotics MCU) powered by RISC-V that delivers lower latency and additional real-time capabilities in ROS 2 MCU interactions. The ultimate objective of the project is to design an MCU that contains a native ROS 2 hardware implementation.
Project's technical name: robo-v-mcu.
A microcontroller (MCU for microcontroller unit) is a small computer that contains one or more CPUs (processor cores) along with memory and programmable input/output peripherals. MCUs are typically more specialized than microprocessors (MPUs, sometimes also known as Application Processing Unit or APUs), as they integrate functions which are specific to a certain domain or area of application. Though microcontrollers are generally accepted as programmable specialized devices, most MCUs used in robotics today have rather general purpose building blocks. There is not much robotics-specific in any of them.
Current popular strategies in robotics for integrating microcontrollers involve complex bridges that break DDS databus interoperability and that introduce undesired delays and much complexity, delivering a hard to optimize and maintain result, namely the micro-ROS project (XRCE-DDS approach). The Robotics MCU project aims to tackle some of the problems identified in the micro-ROS architecture by focusing on 1) enabling ROS 2 direct interoperability from within an open MCU design in the form of a soft-core, 2) performing benchmarks of the resulting design and analyze data together with the micro-ROS approach in both soft and hard-cores, 3) creating a native ROS 2 hardware implementation in an MCU by bringing software layers of the design into IP blocks that can be then transformed into hardware, 4) Customizations of the Instruction Set Architecture (ISA) to optimize ROS 2 operations and 5) prototyping the resulting Robotics MCU design as a hard-core with one of the popular foundries (and currently available programs).
The Robotics MCU subproject will be developed as part of the ROS 2 Hardware Acceleration Working Group and prototyped first into an FPGA and later into a physical chip.
The project is open to sponsorships and collaborations. For sponsoring the Robotics MCU project contact here.
1 (ongoing): Robotics MCU as an open RISC-V based MCU design with ROS 2 direct interoperability capabilities (soft-core)
phase 1 - hw: CORE-V-MCU adaptation to KR260 (ongoing)
phase 2 - rtos: FreeRTOS, this might come for free (see demo)
phase 3 - net. stack: lwIPphase 4 - comm. middleware: embeddedRTPSphase 5 - ROS: rmw_embeddedrtps, rmw, rcl, rclc2: benchmarks of (soft-core) Robotics MCU in an FPGA and comparison with existing alternatives in other soft and hard-cores3: hardware prototyping the resulting Robotics MCU with a popular foundry/program4: native ROS 2 hardware implementation by bringing software layers of the design into IP blocks that can be then transformed into hardware (soft-core)5: customizations of the ISA to optimize ROS 2 operations6: hardware prototyping 2 the resulting Robotics MCU with a popular foundry/programProvide reference examples and blueprints for acceleration architectures used in ROS 2 and Gazebo.
Summarizing easily measurable dissemination efforts that happened as part of the HAWG 1:
Articles and posts in digital media, including robotics communities and social media| Publication (date & link) | views | reactions |
|---|---|---|
| April | ||
LinkedIn - A review of Physics simulators for robotic applications week 4-04-2021 |
23K views | 266 reactions |
LinkedIn - A survey of FPGA-based robotics computing week 11-04-2021 |
10K views | 73 reactions |
LinkedIn - Kria portfolio announcement week 18-04-2021 |
2.2K views | 11 reactions |
LinkedIn - Proposal for ROS 2 Acceleration Working group week 25-04-2021 |
6.8K views | 70 reactions |
ROS Discourse - Proposal for ROS 2 Acceleration WG link |
4.7K (highly targeted) | 52 reactions |
| May | ||
LinkedIn - Accelerating Robot Dynamics Gradients on a CPU, GPU and FPGA week 03-05-2021 |
11.3K views | 87 reactions |
LinkedIn - Robomorphic computing week-10-05-2021 |
10K views | 69 reactions |
LinkedIn - Robot Motion Planning on a Chip week-17-05-2021 |
31K views | 348 reactions |
LinkedIn - Time-Sensitive Networking for Robotics week-24-05-2021 |
11.2K views | 74 reactions |
| June | ||
LinkedIn - Time Synchronization in Modular Colaborative Robots week-01-06-2021 |
9.2K views | 50 reactions |
LinkedIn - An FPGA-Based Open Architecture Industrial Robot Controller week-07-06-2021 |
9.2K views | 70 reactions |
ROS Discourse - Announcing the Hardware Acceleration WG, meeting #1 week-07-06-2021 |
3K (highly targeted) | 6 reactions |
LinkedIn - Announcing the Hardware Acceleration WG, meeting #1 week-07-06-2021 |
6000 views | 82 reactions |
LinkedIn - A Survey on FPGA-Based Sensor Systems week-14-06-2021 |
5K views | 24 reactions |
LinkedIn - Flexible Hardware Acceleration for ROS 2 Applications week-21-06-2021 |
15K views | 137 reactions |
LinkedIn - ROS 2 Hardware Acceleration Working Group - meeting #1 week-28-06-2021 |
7K views | 94 reactions |
| August | ||
LinkedIn - HAWG meeting #2 10/08/2021 |
9K views | 103 reactions |
ROS Discourse - Hardware Acceleration WG, meeting #2 10/08/2021 |
2K views (highly targeted) | 6 reactions |
LinkedIn - Xilinx is proposing a new standard for hardware acceleration in #robotics 26/08/2021 |
8K views | 113 reactions |
LinkedIn - "Adaptive Computing in Robotics" paper 27/08/2021 |
17K views | 199 reactions |
ROS Discourse - REP-2008 RFC - ROS 2 Hardware Acceleration Architecture and Conventions 27/08/2021 |
1.8K views (highly targeted) | ~ 30 reactions |
robotics-worldwide - mailing list post, announce HAWG#2 meeting 20/08/2021 |
||
| September | ||
LinkedIn - Introducing the #Kria Robotics Stack 15/09/2021 |
9K views | 94 reactions |
LinkedIn - Xilinx is adopting #ROS 2 and Gazebo as its #robotics #SDK, empowering hardware acceleration and next-gen robot chips 16/09/2021 |
9K views | 121 reactions |
LinkedIn - ROS 2 simplifies hardware acceleration for robots 28/09/2021 |
5k views | 66 reactions |
RBR - ROS 2 Simplifies Hardware Acceleration for Robots 28/09/2021 |
||
LinkedIn - HAWG second meeting recording 30/09/2021 |
5600 | 41 |
ROS Discourse - Kria Robotics Stack (KRS) alpha release, a ROS 2 superset for industry 28/09/2021 |
900 views (highly targeted) | 8 reactions |
| October | ||
ROS Discourse - Simplifying ROS 2 embedded flows with colcon extensions 20/10/2021 |
350 views (highly targeted) | ~ 10 |
ROS Discourse - Hardware Acceleration WG, meeting #3 20/10/2021 |
400 views (highly targeted) | |
| November | ||
LinkedIn - HAWG third meeting 02/11/2021 |
5K | 50 |
LinkedIn - Adaptive ROS 2 Node computations and hardware acceleration contributions 22/11/2021 |
4825 | 47 |
ROS Discourse - Adaptive ROS 2 Node computations and hardware acceleration contributions 22/11/2021 |
551 views (highly targeted) | 19 |
ROS Discourse - Hardware Acceleration WG, meeting #4 21/11/2021 |
562 views (highly targeted) | 4 |
LinkedIn - HAWG meeting #4 11/2021 |
2152 | 26 |
LinkedIn - Hardware Acceleration in ROS 2 survey 11/2021 |
2599 | 16 |
| December | ||
LinkedIn - Modern Robotics Compute Architectures – Flexibility, Optimization is Key 12/2021 |
9514 | 98 |
TOTALS 2021 (roughly) |
250K+ VIEWS |
2000+ REACTIONS |
| Publication (date & link) | views | reactions |
|---|---|---|
| April | ||
| HAWG#1 | 569 views | 19 reactions |
| HAWG#2 | 258 views | 11 reactions |
| HAWG#3 | 302 views | 14 reactions |
| HAWG#4 | 88 views | 4 reactions |
There're various unaccounted sources including Reddit, public mailing lists and other blogs/forums. ↩
The objective of this ticket is to discuss and coordinate the upcoming proposal the HAWG will submit for a workshop during ROSCon 2022.
Important aspects:
Topics desired:
(send feedback bellow)
NOTE: This ticket has moved to https://github.com/ros-acceleration/robotic_processing_unit.
This ticket tracks the progress of the Robotic Processing Unit (RPU) subproject of the ROS 2 Hardware Acceleration Working Group. Content will be updated over time. In time, a repository will branch out of this effort containing additional resources. Expectation however should be for the discussion to remain in here for organizational purposes. You can send feedback about this subproject via this form.
RPU)Definition: A robot-specific processing unit that maps ROS and robot computational graphs efficiently to underlying compute resources including CPUs, FPGAs and GPUs to obtain best performance.
The vision is that RPUs will empower robots with the ability to react faster (lower latency, higher throughput), consume less power, and deliver additional real-time capabilities with their custom compute architectures that fit best the usual robotics pipelines. This includes tasks across sensing, perception, mapping, localization, motion control, low-level control and actuation.
The initial objective of this subproject is not to design a new physical device. Instead, existing off-the-shelf hardware acceleration development platforms will be used to prototype a robot-specific processing unit that performs best when it comes to ROS 2 and robot computational graphs.
The project is open to sponsorships and collaborations. For sponsoring the Robotic Processing Unit (RPU) contact here.
Milestone 1: first demonstrators - raise awareness
RPU) project announcementimage_pipeline and friends)
perception_2nodesperception_3nodesHi, every body.
I want to choose an appropriate mini pc for my robotic application.
I want to know which part of my mini PC I should spend more money on.
The duty of the mini-pc is mainly to collect data from its I/O and emit the data over ROSnetwork, and maybe in the future, some ROS2 packages will be run on this mini-pc too.
As I know, most ROS packages run on the CPU and RAM, also Localhost, and for external communication nodes, send and receive from the network is mainly handled by the CPU and network card.
Should I spend more on my CPU and RAM, and network card?
Can ROS2 communicate effectively with 10Gb and 25Gb card networks?
Are there any sources that guide me to the bottlenecks in components of computers for implementing ROS2?
Another question is how I should find that sending and proccing data on one local robotics core server and receiving from its server is faster than my computer processing data with my non-efficient algorithm. (due to the physical distance between my computer and the local robotics core server that couldn't be omitted)
Are there any sources to help me to find this type of question?
Task list:
tracetools (fork might get integrated into tracetools in the future if appropriate) https://github.com/ros-acceleration/tracetools_accelerationacceleration_examples
adaptive_componentInstructions to add a new board to the community.
Follows from #34. Summarizing easily measurable dissemination efforts that happened as part of the HAWG:
| Year | Objective |
|---|---|
21 |
✅ 1) Design tools and conventions to seamlessly integrate acceleration kernels and related embedded binaries into the ROS 2 computational graphs leveraging its existing build system (ament_acceleration extensions) 1, meta build tools (colcon-acceleration extension) and a new firmware layer (acceleration_firmware) 2. |
21 |
✅ 2) Provide reference examples and blueprints for acceleration architectures used in ROS 2 and Gazebo. |
21 |
✅ 3) REP-2008 (ROS 2 Hardware Acceleration Architecture and Conventions) first draft proposed PR |
22 |
✅ 4) Facilitate testing environments that allow to benchmark accelerators with special focus on power consumption and time spent on computations (see HAWG benchmarking approach, community#9, tracetools_acceleration, ros2_kria) |
22 |
✅ 5) Survey the community interests on acceleration for ROS 2 and Gazebo (see discourse announcement, survey, result). |
22 |
✅ 6) Produce demonstrators with robot components, real robots and fleets that include acceleration to meet their targets (see acceleration_examples). |
22 |
✅ 7) Acceleration of complete ROS 2 computational graphs #20 |
22 |
❌3 8) Merge first hardware accelerators (kernels) into upstream packages (candidate: image_pipeline, see image_pipeline instrumented at #717 ) |
22 |
✅ 9) Documentation and a "methodology to hardware accelerate a ROS 2 package" (see #20) |
22 |
❌4 10) Organize workshops on robotics and ROS 2 Hardware Acceleration |
22 |
🚧 11) Robotic Processing Unit, first demonstrators #25 |
22 |
✅ 12) REP-2008 (ROS 2 Hardware Acceleration Architecture and Conventions) accepted as an official standard |
22 |
✅ 13) REP-2014 (Benchmarking performance in ROS 2) first draft proposed PR |
23 |
✅ 11) REP-2014 (Benchmarking performance in ROS 2), PR finalized and submitted. Unfortunately it got rejected without technical argumentation ( 🔥 heated discussion) |
23 |
✅ 14) More vendor support. Intel Quartus and oneAPI ecosystems enabled with the ROS 2 Hardware Acceleration Stack 5 |
23 |
❌ 15) |
23 |
✅ 16) RobotPerf benchmarks |
23 |
🚧 17) Robotic Processing Unit, first demonstrators #25 |
24 |
🚧 17) Robotic Processing Unit, first demonstrators #25 |
24 |
🚧 18) New ROS-related network accelerators that build upon the FPGA-native ROS 2 message-passing infrastructure |
24 |
🚧 19) Evolve RobotPerf and expand it. Include new benchmark categories and other communities |
articles and posts in traceable digital mediaMeeting recordings (YouTube channel)| Publication (date & link) | views | reactions |
|---|---|---|
| HAWG#1 | 1028 views (0.15x growth) |
25 reactions |
| HAWG#2 | 508 views (0.14x growth) |
16 reactions |
| HAWG#3 | 442 views (0.10x growth) |
16 reactions |
| HAWG#4 | 201 views (0.17x growth) |
9 reactions |
| HAWG#5 | 180 views (0.13x growth) |
3 reactions |
| HAWG#6 | 385 views (0.10x growth) |
15 reactions |
| HAWG#7 | 246 views (0.13x growth) |
2 reactions |
| HAWG#8 | 229 views (0.18x growth) |
9 reactions |
| HAWG#9 | 370 views (0.10x growth) |
6 reactions |
| HAWG#10 | 433 views (0.27x growth) |
5 reactions |
| HAWG#11 | 255 views (0.26x growth) |
3 reactions |
| HAWG#12 | 240 views (0.39x growth) |
4 reactions |
| HAWG#13 | 229 views (0.74x growth) |
2 reactions |
| HAWG#14 | 224 views | 3 reactions |
| HAWG#15 | 218 views | 4 reactions |
| HAWG#16 | 112 views | 1 reactions |
| HAWG#17 | 42 views | 0 reactions |
| HAWG#18 | 39 views | 1 reactions |
| HAWG#19 | 49 views | 0 reactions |
| HAWG#20 | 40 views | 0 reactions |
| HAWG#21 | 72 views | 0 reactions |
| HAWG#22 | 121 views | 0 reactions |
| RobotPerf subproject - meeting#1 | 134 views | 0 reactions |
| RobotPerf subproject - meeting#2 | 47 views | 0 reactions |
| RobotPerf subproject - meeting#3 | 108 views | 1 reactions |
| RobotPerf subproject - meeting#4 | 88 views | 0 reactions |
The Hardware Acceleration Working Group continued growing significantly during 2023. Altogether, that is 3 years of continued growth (2021, 2022). Having accomplished most of the initial objectives of the working group when created in 2021, and having supported multiple silicon vendors as part of the The ROS 2 Hardware Acceleration Stack, the working group will focus next on three objectives: the first objective is to continue working on demonstrators and case studies. We generated very exciting results within 2023 that we'll expand during the next year and hopefully disclose publicly. The second objectives will be to build upon the success of the reference FPGA-based ROS 2 implementation for High-Speed Networking and explore other accelerators. Some ideas include bridging between other communication middlewares or even pushing the speed of networking interactions faster. The third objective is to evolve the RobotPerf project, which attracted quite a few contributors already (see RobotPerf paper). Subgoals here would be to create more benchmark releases, add new benchmarking categories (with their corresponding benchmark implementations) and ultimately, expand the project to other communities which could benefit from it, all while remaining ROS-centric.
Altogether, the objectives for the coming year look as follows:
| Year | Objective |
|---|---|
24 |
🚧 17) Robotic Processing Unit, first demonstrators #25 |
24 |
🚧 18) New ROS-related network accelerators that build upon the FPGA-native ROS 2 message-passing infrastructure |
24 |
🚧 19) Evolve RobotPerf and expand it. Include new benchmark categories and other communities |
See ament_vitis ↩
See acceleration_firmware_kv260 for an exemplary vendor extension of the acceleration_firmware package ↩
Did not get buy-in from maintainers. Stopped the effort. ↩
Discarded for ROSCon and IROS. Lots of work. ↩
Reach out for more information about Intel's enablement extensions of the ROS build system and build tools. ↩
After months of work, given preliminary results and expectations derived from those, we decided to pivot elsewhere and wrap the Robotics MCU project. Shortly, the performance obtained in RISC-V soft-core based ROS 2 implementations explored was not bringing much value on top of existing CPU implementations of ROS 2. Instead, we invested resources in exploring an FPGA-based ROS 2 implementation for High-Speed Networking. ↩
Rationale of this ticket is to define a reference computational graph system for the hardware acceleration WG efforts that should serve as a reference resource for benchmarking purposes (in concert with other efforts including #9).
Hi,
I would like to start porting acceleration_firmware_ultra96v2 for krs_beta/1.0. Looking at the install instrucctions it states that uses Ubuntu 20.04+vitis 2021.2+Ros2 Rolling
But Ros2 Rolling is a development distro, so it changes over time, so it would be better to use Humble (which has LTS up to May 2027). But, if I use Humble, it states that has binaries for Ubuntu 22.04 (which is also LTS up to April 2027), to use it on Ubuntu 20.04, I should install from sources
Besides that, Vitis is now on 2022.1, so which approach would be better?
a) Use Ubuntu 20.04+vitis 2021.2+Ros2 Humble? (similar to krs_alpha, only ROS2 change, but I need to build ROS2 from sources and there is no assurance about compatibility)
b) Use Ubuntu 20.04+vitis 2021.2+Ros2 Rolling as stated in the install instructions? (But how can I assure that the Ros2 Rolling version used to built the firmware will be the same Ros2 Rolling version at later time?)
c) Use Ubuntu 22.04+vitis 2022.1+Ros2 Humble (which has LTS on ROS and Ubuntu and has the latest release of Vitis, but there is no assurance about compatibility and has a different toolset than krs_alpha)
Any thought/advice?
Regards,
Pedro
Refer to #20 for the methodology.
Hello,
I am trying to add a subproject for the stereo_image_proc accelerated disparity node but I do not see where to add in the subprojects.
should I make a pull request on the image_pipeline repo? The PR would be WIP, but need feedback from community on colcon build errors.
Follows from #19. Summarizing easily measurable dissemination efforts that happened as part of the HAWG:
| Year | Objective |
|---|---|
21 |
✅ 1) Design tools and conventions to seamlessly integrate acceleration kernels and related embedded binaries into the ROS 2 computational graphs leveraging its existing build system (ament_acceleration extensions) 1, meta build tools (colcon-acceleration extension) and a new firmware layer (acceleration_firmware) 2. |
21 |
✅ 2) Provide reference examples and blueprints for acceleration architectures used in ROS 2 and Gazebo. |
21 |
✅ 3) REP-2008 (ROS 2 Hardware Acceleration Architecture and Conventions) first draft proposed PR |
22 |
✅ 4) Facilitate testing environments that allow to benchmark accelerators with special focus on power consumption and time spent on computations (see HAWG benchmarking approach, community#9, tracetools_acceleration, ros2_kria) |
22 |
✅ 5) Survey the community interests on acceleration for ROS 2 and Gazebo (see discourse announcement, survey, result). |
22 |
✅ 6) Produce demonstrators with robot components, real robots and fleets that include acceleration to meet their targets (see acceleration_examples). |
22 |
✅ 7) Acceleration of complete ROS 2 computational graphs #20 |
22 |
❌3 8) Merge first hardware accelerators (kernels) into upstream packages (candidate: image_pipeline, see image_pipeline instrumented at #717 ) |
22 |
✅ 9) Documentation and a "methodology to hardware accelerate a ROS 2 package" (see #20) |
22 |
❌4 10) Organize workshops on robotics and ROS 2 Hardware Acceleration |
22 |
🚧 11) Robotic Processing Unit, first demonstrators #25 |
22 |
✅ 12) REP-2008 (ROS 2 Hardware Acceleration Architecture and Conventions) accepted as an official standard |
22 |
✅ 13) REP-2014 (Benchmarking performance in ROS 2) first draft proposed PR |
23 |
🚧 11) REP-2014 (Benchmarking performance in ROS 2) |
23 |
🚧 14) More vendor support. Will work to enable new silicon solutions |
23 |
🚧 15) Robotics MCU #31 milestone 1 |
23 |
🚧 16) RobotPerf benchmarks |
23 |
🚧 17) Robotic Processing Unit, first demonstrators #25 |
articles and posts in traceable digital mediaMeeting recordings (YouTube channel)| Publication (date & link) | views | reactions |
|---|---|---|
| April | ||
| HAWG#1 | 887 views (0.55x growth) |
24 reactions |
| HAWG#2 | 445 views (0.72x growth) |
15 reactions |
| HAWG#3 | 399 views (0.32x growth) |
15 reactions |
| HAWG#4 | 171 views (0.94x growth) |
8 reactions |
| HAWG#5 | 158 views | 3 reactions |
| HAWG#6 | 348 views | 15 reactions |
| HAWG#7 | 217 views | 2 reactions |
| HAWG#8 | 194 views | 9 reactions |
| HAWG#9 | 335 views | 6 reactions |
| HAWG#10 | 339 views | 5 reactions |
| HAWG#11 | 202 views | 2 reactions |
| HAWG#12 | 172 views | 4 reactions |
| HAWG#13 | 131 views | 1 reaction |
The Hardware Acceleration Working Group has grown significantly over 2022. The working group has several key objectives for 2023. The first objective is to develop and publish a comprehensive set of benchmarking tools packed in a suite (RobotPerf) for measuring the performance and efficiency of various software components (ROS packages) and hardware solutions commonly used in robotics. This will enable members of the working group to accurately compare and evaluate the performance of different hardware options and make informed decisions about which components to use in their own projects.
The second objective is to increase the number of vendors participating in the working group. By engaging in targeted outreach and engagement efforts, the group aims to bring more vendors on board, which will provide more options for members and increase the overall diversity of hardware components available for testing and evaluation.
The third objective is to increase the number of collaborations with industry partners. This will gather practical experience and feedback on the performance of hardware acceleration techniques in real-world robotics applications and will also increase the working group's visibility and impact.
The fourth objective is to continue investing resources in the ongoing strategic projects announced during 2022. In particular RobotPerf, Robotics MCU and the Robotics Processing Unit.
Altogether, the objectives for the coming year look as follows:
| Year | Objective |
|---|---|
23 |
🚧 11) REP-2014 (Benchmarking performance in ROS 2) |
23 |
🚧 14) More vendor support. Will work to enable new silicon solutions |
23 |
🚧 15) Robotics MCU #31 milestone 1 |
23 |
🚧 16) RobotPerf benchmarks |
23 |
🚧 17) Robotic Processing Unit, first demonstrators #25 |
See ament_vitis ↩
See acceleration_firmware_kv260 for an exemplary vendor extension of the acceleration_firmware package ↩
Did not get buy-in from maintainers. Stopped the effort. ↩
Discarded for ROSCon and IROS. Lots of work. ↩
I would like to use this board to create low cost autonomous vehicles. Need hw acceleration enabled to process visual odometry.
https://m.alibaba.com/product/1600074686709/lichee-tang-HEX-ZYNQ7020-FPGA-Development.html
Hello,
I followed the instructions on https://news.accelerationrobotics.com/ros-2-humble-in-nvidia-xavier-agx-with-yocto/
But unfortunately I got the following error when bitbaking demo-image-ros2:
It seems that one of the ros examples is causing trouble. I will attempt again after removing examples-rclcpp* from the bb description.
Best Regards,
C.A.
can@sidekick:~/tegra-bsp-honister/build$ bitbake demo-image-ros2
Loading cache: 100% |#######################################################################################################################################################################| Time: 0:00:01
Loaded 5185 entries from dependency cache.
NOTE: Resolving any missing task queue dependencies
Build Configuration:
BB_VERSION = "1.52.0"
BUILD_SYS = "x86_64-linux"
NATIVELSBSTRING = "universal"
TARGET_SYS = "aarch64-oe4t-linux"
MACHINE = "jetson-agx-xavier-devkit"
DISTRO = "tegrademo"
DISTRO_VERSION = "3.4.3+snapshot-20230215"
TUNE_FEATURES = "aarch64 armv8a crc"
TARGET_FPU = ""
DISTRO_NAME = "OE4Tegra Demonstration Distro"
ROS_DISTRO = "humble"
ROS_VERSION = "2"
ROS_PYTHON_VERSION = "3"
meta = "HEAD:580532cfd0c23e27a366c074e806fc0b6908b874"
meta-tegra
contrib = "HEAD:b2481c12ae0468c85b76332faa2922682245e185"
meta-oe
meta-python
meta-networking
meta-filesystems = "HEAD:a19d1802b15fe07e9b1e7584ff9af7c33bfe642a"
meta-virtualization = "HEAD:bd7511c53b921c9ce4ba2fdb42778ca194ebc3e8"
meta-tegra-community = "HEAD:4a47d3798404904eec5299306d063a6ec753b158"
meta-tegra-support
meta-demo-ci
meta-tegrademo = "honister:a70a14f6403955d62ca53ba19254efa75d29e6f6"
meta-ros2
meta-ros2-humble
meta-ros-common = "honister-humble:59a615d6e1b30f8576711d7281d1be097b25c33c"
Initialising tasks: 100% |##################################################################################################################################################################| Time: 0:00:12
Sstate summary: Wanted 3808 Local 0 Network 0 Missed 3808 Current 1856 (0% match, 32% complete)
NOTE: Executing Tasks
ERROR: examples-rclcpp-minimal-service-0.15.0-2-r0 do_compile: ExecutionError('/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/temp/run.do_compile.2377923', 1, None, None)
ERROR: Logfile of failure stored in: /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/temp/log.do_compile.2377923
Log data follows:
| DEBUG: Executing shell function do_compile
| NOTE: VERBOSE=1 cmake --build /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/build --target all --
| [1/2] /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native/usr/bin/aarch64-oe4t-linux/aarch64-oe4t-linux-g++ -DDEFAULT_RMW_IMPLEMENTATION=rmw_fastrtps_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/example_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native/usr/lib/python3.9/site-packages/numpy/core/include -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/ament_index_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/libstatistics_collector -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/builtin_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_runtime_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcutils -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_interface -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_runtime_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_fastrtps_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rmw -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_fastrtps_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_introspection_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_introspection_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_logging_interface -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_yaml_param_parser -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/tracetools -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcpputils -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/statistics_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosgraph_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/action_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/unique_identifier_msgs -march=armv8-a+crc -fstack-protector-strong -O2 -D_FORTIFY_SOURCE=2 -Wformat -Wformat-security -Werror=format-security -Wdate-time --sysroot=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot -O2 -pipe -g -feliminate-unused-debug-types -fmacro-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0=/usr/src/debug/examples-rclcpp-minimal-service/0.15.0-2-r0 -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0=/usr/src/debug/examples-rclcpp-minimal-service/0.15.0-2-r0 -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot= -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native= -fvisibility-inlines-hidden -march=armv8-a+crc -fstack-protector-strong -O2 -D_FORTIFY_SOURCE=2 -Wformat -Wformat-security -Werror=format-security -Wdate-time --sysroot=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot -Wall -Wextra -Wpedantic -std=gnu++17 -MD -MT CMakeFiles/service_main.dir/main.cpp.o -MF CMakeFiles/service_main.dir/main.cpp.o.d -o CMakeFiles/service_main.dir/main.cpp.o -c /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/git/main.cpp
| FAILED: CMakeFiles/service_main.dir/main.cpp.o
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native/usr/bin/aarch64-oe4t-linux/aarch64-oe4t-linux-g++ -DDEFAULT_RMW_IMPLEMENTATION=rmw_fastrtps_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/example_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native/usr/lib/python3.9/site-packages/numpy/core/include -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/ament_index_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/libstatistics_collector -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/builtin_interfaces -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_runtime_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcutils -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_interface -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_runtime_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_fastrtps_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rmw -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_fastrtps_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_introspection_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_introspection_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_logging_interface -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcl_yaml_param_parser -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/tracetools -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rcpputils -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/statistics_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosgraph_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_cpp -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rosidl_typesupport_c -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/action_msgs -I/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/unique_identifier_msgs -march=armv8-a+crc -fstack-protector-strong -O2 -D_FORTIFY_SOURCE=2 -Wformat -Wformat-security -Werror=format-security -Wdate-time --sysroot=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot -O2 -pipe -g -feliminate-unused-debug-types -fmacro-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0=/usr/src/debug/examples-rclcpp-minimal-service/0.15.0-2-r0 -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0=/usr/src/debug/examples-rclcpp-minimal-service/0.15.0-2-r0 -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot= -fdebug-prefix-map=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot-native= -fvisibility-inlines-hidden -march=armv8-a+crc -fstack-protector-strong -O2 -D_FORTIFY_SOURCE=2 -Wformat -Wformat-security -Werror=format-security -Wdate-time --sysroot=/home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot -Wall -Wextra -Wpedantic -std=gnu++17 -MD -MT CMakeFiles/service_main.dir/main.cpp.o -MF CMakeFiles/service_main.dir/main.cpp.o.d -o CMakeFiles/service_main.dir/main.cpp.o -c /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/git/main.cpp
| In file included from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/service.hpp:36,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/callback_group.hpp:25,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/any_executable.hpp:20,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/memory_strategy.hpp:25,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/memory_strategies.hpp:18,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/executor_options.hpp:20,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/executor.hpp:37,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/executors/multi_threaded_executor.hpp:25,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/executors.hpp:21,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/rclcpp.hpp:155,
| from /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/git/main.cpp:19:
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/any_service_callback.hpp: In instantiation of 'struct rclcpp::detail::can_be_nullptr<void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request_<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response_<std::allocator > >), void>':
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/any_service_callback.hpp:109:80: required by substitution of 'template<class CallbackT, typename std::enable_if<rclcpp::detail::can_be_nullptr<CallbackT, void>::value, int>::type > void rclcpp::AnyServiceCallback<example_interfaces::srv::AddTwoInts>::set<CallbackT, >(CallbackT&&) [with CallbackT = void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request_<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response_<std::allocator > >); typename std::enable_if<rclcpp::detail::can_be_nullptr<CallbackT, void>::value, int>::type = ]'
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/create_service.hpp:43:3: required from 'typename rclcpp::Service::SharedPtr rclcpp::create_service(std::shared_ptrrclcpp::node_interfaces::NodeBaseInterface, std::shared_ptrrclcpp::node_interfaces::NodeServicesInterface, const string&, CallbackT&&, const rmw_qos_profile_t&, rclcpp::CallbackGroup::SharedPtr) [with ServiceT = example_interfaces::srv::AddTwoInts; CallbackT = void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request_<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response_<std::allocator > >); typename rclcpp::Service::SharedPtr = std::shared_ptr<rclcpp::Service<example_interfaces::srv::AddTwoInts> >; std::__cxx11::string = std::cxx11::basic_string; rmw_qos_profile_t = rmw_qos_profile_s; rclcpp::CallbackGroup::SharedPtr = std::shared_ptrrclcpp::CallbackGroup]'
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/node_impl.hpp:147:53: required from 'typename rclcpp::Service::SharedPtr rclcpp::Node::create_service(const string&, CallbackT&&, const rmw_qos_profile_t&, rclcpp::CallbackGroup::SharedPtr) [with ServiceT = example_interfaces::srv::AddTwoInts; CallbackT = void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response<std::allocator > >); typename rclcpp::Service::SharedPtr = std::shared_ptr<rclcpp::Service<example_interfaces::srv::AddTwoInts> >; std::cxx11::string = std::cxx11::basic_string; rmw_qos_profile_t = rmw_qos_profile_s; rclcpp::CallbackGroup::SharedPtr = std::shared_ptrrclcpp::CallbackGroup]'
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/git/main.cpp:40:82: required from here
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/any_service_callback.hpp:48:74: error: assignment of read-only location 'std::declval<void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response<std::allocator > >)>()'
| decltype(std::declval() == nullptr), decltype(std::declval<T &>() = nullptr)>>
| ~~~~~~~~~~~~~~~~~~~~^~~~~~~~~
| /home/can/tegra-bsp-honister/build/tmp/work/armv8a-oe4t-linux/examples-rclcpp-minimal-service/0.15.0-2-r0/recipe-sysroot/usr/include/rclcpp/rclcpp/any_service_callback.hpp:48:74: error: assignment of read-only location 'std::declval<void (&)(std::shared_ptr<rmw_request_id_s>, std::shared_ptr<example_interfaces::srv::AddTwoInts_Request<std::allocator > >, std::shared_ptr<example_interfaces::srv::AddTwoInts_Response<std::allocator > >)>()'
| ninja: build stopped: subcommand failed.
| WARNING: exit code 1 from a shell command.
ERROR: Task (/home/can/tegra-bsp-honister/layers/meta-ros/meta-ros2-humble/generated-recipes/examples/examples-rclcpp-minimal-service_0.15.0-2.bb:do_compile) failed with exit code '1'
NOTE: Tasks Summary: Attempted 11451 tasks of which 5777 didn't need to be rerun and 1 failed.
Summary: 1 task failed:
/home/can/tegra-bsp-honister/layers/meta-ros/meta-ros2-humble/generated-recipes/examples/examples-rclcpp-minimal-service_0.15.0-2.bb:do_compile
Summary: There was 1 ERROR message shown, returning a non-zero exit code.
Hi,
I would like to add the ultra96-v2 board to the list of community supported boards because it's popular, so more people could contribute to the ROS 2 HAWG
regards,
Pedro
Push to a public repository in the organization the firmware artifacts to simplify development flows in a ROS 2-centric manner while maintaining a technology (FPGAs/GPUs) and target (embedded, workstation, data center) agnostic.
acceleration_firmware ROS 2 packageacceleration_firmware_* ROS 2 packages (one for each board supported)The road-map from now on is (the order might change between some steps, since not all of them are depended to each other):
- Add LWIP to the current cli-test, with necessary functions filled with dummy functionalities.
- err_t vif_init(struct netif *netif)
- err_t vif_link_output(struct netif *netif, struct pbuf *p)
- err_t vif_output(struct netif *netif, struct pbuf *p, ip_addr_t *ipaddr)
- err_t vif_input(struct netif *netif)
- Add test options to current cli-test interface to manipulate the Lwip initialization settings, and trigger some test stimulus.
- Tie the output and input functions to the MAC (This might require some modifications on MAC)
- Test and debug the system using the current built-in loop-back in the MAC.
- Reroute the i2c interface to the PHY - test first using the current i2c functionality.
- Tie the init function to PHY control.
- Test the network on PHY loop-back. (I assume PHY has loop-back functionality).
- Test the network on Hardware tied to a PC. The tests beyond this point are to be evaluated.
Extend the ROS 2 meta build system to include hardware acceleration capabilities.
Using Matrix as an open network for secure, decentralized communication.
Extend the ROS 2 meta build tools (colcon) to facilitate hardware acceleration development flows.
Follow past surveys in the community. Disclose results afterwards.
Rationale: Hardware acceleration involves creating custom compute architectures to improve the computing performance. In a nutshell, by designing specialized acceleration kernels, one can build custom brains for robots to hasten their response time. This becomes specially feasible when using adaptive computing and FPGAs which according to previous benchmarks, deliver best results in robotics with ROS #20 1.
Creating such custom compute architectures involves both hardware and software customization, thereby: Yocto. Though complicated, Yocto in combination with hardware acceleration helps deliver high performance production-grade robotic systems.
Bringing ROS 2 Humble support for Yocto is being contributed at ros/meta-ros#1003. The recipes have been validated with various popular SBCs. Instructions on how to reproduce in the links below. If you find any issues, report it and contribute back.
| Image | Board | Description |
|---|---|---|
 |
AMD KR260 | The Kria™ KR260 Robotics Starter Kit is a Kria SOM-based development platform for robotics and factory automation applications. With native ROS 2 Humble support, it enables roboticists with a ROS 2-centric dev. flow. |
 |
AMD KV260 | The Kria™ KV260 starter kit is a development platform for the K26, the first adaptive Single Board Computer. KV260 offers a compact board for edge vision and robotics applications. |
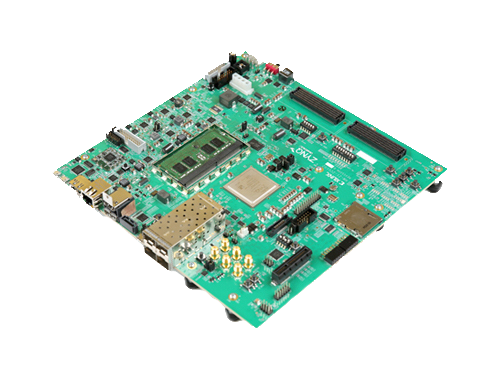 |
AMD ZCU102 | The ZCU102 Evaluation Kit enables designers to jumpstart designs for automotive, industrial, video, and communications applications. This kit features a Zynq® UltraScale+™ MPSoC with a quad-core Arm® Cortex®-A53, dual-core Cortex-R5F real-time processors, and a Mali™-400 MP2 graphics processing unit. |
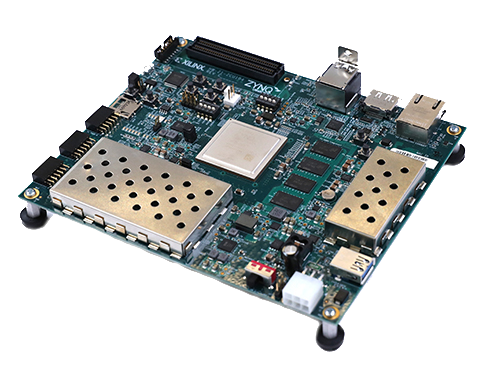 |
AMD ZCU104 | The ZCU104 Evaluation Kit enables designers to jumpstart designs for embedded vision applications such as surveillance, Advanced Driver Assisted Systems (ADAS), machine vision, Augmented Reality (AR), drones and medical imaging. This kit features a Zynq® UltraScale+™ MPSoC EV device with video codec and supports many common peripherals and interfaces for embedded vision use case. |
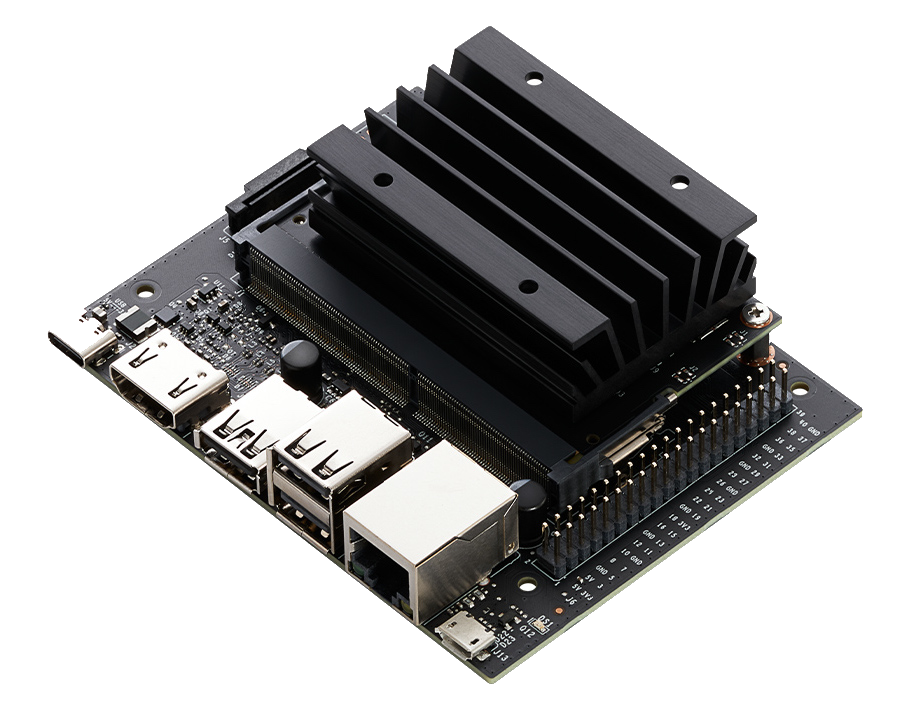 |
NVIDIA Jetson Nano | The Jetson Nano™ Developer Kit is a small, powerful computer that lets you run multiple neural networks in parallel for applications like image classification, object detection, segmentation, and speech processing. All in an easy-to-use platform that runs in as little as 5 watts. |
 |
Jetson AGX Xavier | The NVIDIA Jetson AGX Xavier Developer Kit is an AI computer for autonomous machines, delivering the performance of a GPU workstation in an embedded module under 30W. Jetson AGX Xavier is designed for robots, drones and other autonomous machines. |
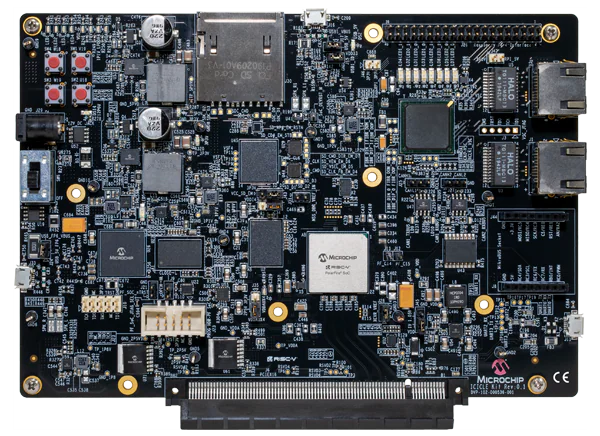 |
Microchip PolarFire Icicle Kit | The PolarFire SoC Icicle kit is a low-cost development platform that enables evaluation of the five-core Linux capable RISC-V microprocessor subsystem, innovative Linux, and real-time execution, low-power capabilities and the rich set of peripherals of the PolarFire SoC FPGA. |
Produce demonstrators with robot components, real robots and fleets that include acceleration to meet their targets.
The ROS 2 Hardware Acceleration Stack is a series of extensions to ROS 2 which allow to leverage hardware acceleration and create custom compute architectures providing a faster ROS 2 execution and a timing-safe event-driven programming interface. The stack is composed of 4 key elements and aims to be hardware and vendor-agnostic:
| # | Standard/convention | Title | Rationale |
|---|---|---|---|
1 |
REP 2009 | Type Negotiation Feature |
Allow ROS 2 Nodes to dynamically negotiate the message types used by publishers and subscriptions, as well adaptively modifying the behavior of publisher and subscriptions to align with accelerators |
2 |
REP 2008 | ROS 2 Hardware Acceleration Architecture and Conventions |
Architectural pillars and conventions required to introduce hardware acceleration in ROS 2 in a scalable and technology-agnostic manner. Presents one interface for all hardware acceleration vendors. |
3 |
REP 2007 | Type Adaptation Feature |
An extension to rclcpp that will make it easier to convert between ROS types and custom, user-defined types for Topics, Services, and Actions. |
4 |
REP 2000 | ROS 2 Releases and Target Platforms |
Production-grade multi-platform ROS support with Yocto |
The ROS 2 Hardware Acceleration Working Group contributes and maintains open source implementations of various components of the stack above. A complete implementation of the ROS 2 Hardware Acceleration Stack including professional support, documentation, examples as well as reference designs is available at Acceleration Robotics' ROBOTCORE™. Other solutions that implement part of the stack include AMD's KRS (the Kria Robotics Stack), or NVIDIA's NITROS (NVIDIA Isaac Transport for ROS).
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.