lenashengzhen / aerialrobotics Goto Github PK
View Code? Open in Web Editor NEWSimulate the path planning and trajectory planning of quadrotors/UAVs.
Simulate the path planning and trajectory planning of quadrotors/UAVs.






































































































Ellipsoid.m 第24行是不是应该开根号呢
no modle trajectory_generator
作者您好,关于SFC3D部分,我有一些问题想跟您请教:
I found your repo interesting, especially its corridor generation.
If your are interested in them, maybe you can see my repo:
https://github.com/ZJU-FAST-Lab/GCOPTER
and especially, an self-developed alg for corridor generation:
https://github.com/ZJU-FAST-Lab/GCOPTER/blob/main/gcopter/include/gcopter/firi.hpp
By the way, firi.hpp is actually outdated, my paper about FIRI alg will be released in two month, which solves a lot of problems in the corridor-generation topic. However, even if the currently released code is outdated, it still outperforms all existing methods in corridor generation. Hope it attracts you.
Hello, can you provide an explanation of trapezoidal speed time allocation in trapezoidalSpeed_ta.m? Looking forward to your reply.
Hello, I can't find the Trajectory Planning Project.
Could you tell me where it is, please
Looking forward to your reply.
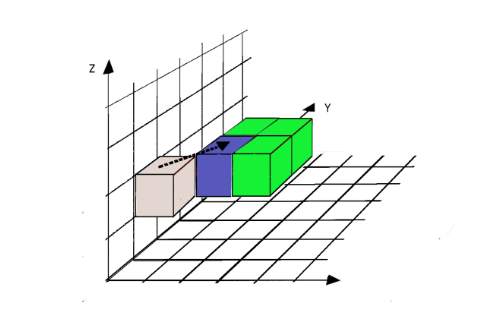
Hi, Lena. I have read the JPS part of your paper, TRAJECTORY PLANNING BASED ON OPTIMIZED JUMP POINT SEARCH RESULTS USING ARTIFICIAL POTENTIAL FIELD IN 3-D ENVIRONMENTS. In this part, you explain the situation about the straight move in 3D space of JPS. It's understandable and clear. I have read a similar paper, JPS Algorithm Adaptation and Optimization to Three-dimensional Space written by Pertti Ranttila and Kesäkuu. 2019, who explains the one-axis, two-axis, three-axis situations. But I was confused by some question when I wanted to calulate the natural neighbor in two-axis situation.
In JPS Algorithm Adaptation and Optimization to Three-dimensional Space
In Planning Dynamically Feasible Trajectories for Quadrotors using Safe Flight Corridors in 3-D Complex Environments
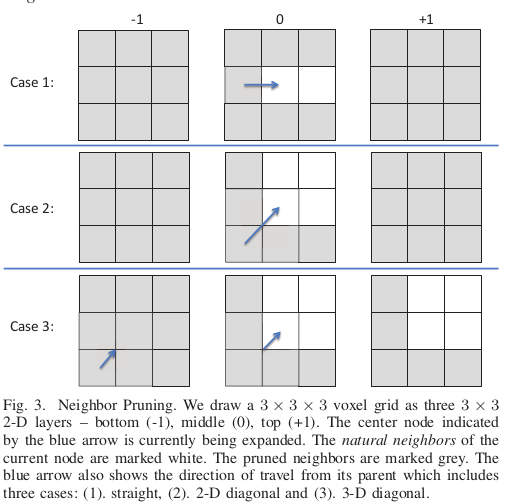
They all prune the top layer and bottom layer in the 3x3 cubic in two-axis situation. However, according to the definition of the natural neighbor,
Straight Moves:
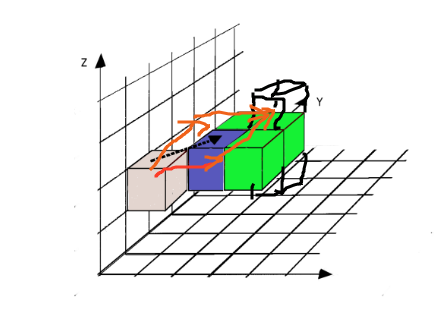
Diagonal Moves:
I found that start from the grey voxel, the cost that I go through the blue voxel and reach the voxel whose cost is sqrt(3) (you can image the corner voxels at the top or bottom layer) is the same as the cost that I go through the voxel that is direct above or below the blue voxel and reach the corner voxels. Why those two voxels cannot be the natural neighbor ? Those two voxels cannot be pruned according to the pruning policy (If my assumption is correct).
Hi, Firstly i would like to say that your implementation of JPS in 3D world is great!
I would like to request if you have any write up on how you implemented the JPS in 3D world?
Thanks, and best regards.
怎样构建一个2d地图下的JPS算法,它和3D哪里不同,怎样表达当前节点和父节点的方向呢?
Hello, I can't find dijkstra and astar.
Could you provide them?
Looking forward to your reply.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.