Metapackage for the official rosjava repositories.
See the rosjava_core readme for more details.
Extra libraries and utilities (usually 3rd party) for android gingerbread and up.
Metapackage for the official rosjava repositories.
See the rosjava_core readme for more details.















These would be very useful. There is some code currently floating around in the graveyard folder in android_remocons.
Can you look on my pr of All sensors app?
It an app that send data from phone sensors (camera, location, temperature, magnumeter, illumination gyro and etc) over ros.
very easy to put your phone on robot, and it will be your sensors of robot.
HI! I'm just begin to run the sample android_tutorial_cv_bridge_image and I got some problems.
I have already followed the tutorials to build the environment for rosjava.
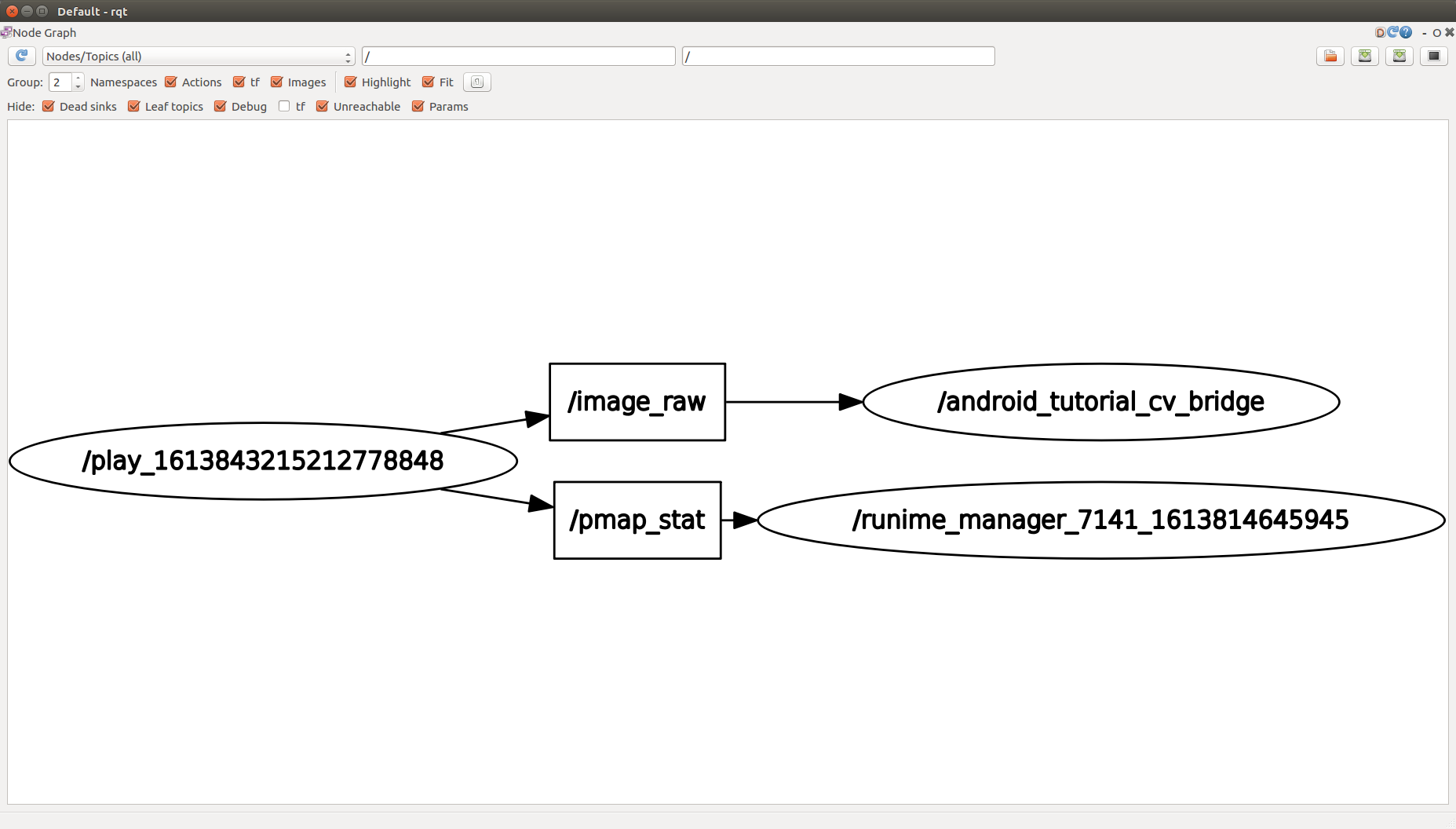
Here I want to play a ROS bag file with topic /image_raw and run the app cv bridge image on my phone (Samsung Galaxy J7 Pro) to show the converted video stream.
All I have changed in the MainActivity.java is the topic name which is /camera/image/raw originally. Just like below:
@Override
public void onStart(ConnectedNode connectedNode) {
this.node = connectedNode;
final org.apache.commons.logging.Log log = node.getLog();
imagePublisher = node.newPublisher("/image_converter/output_video/raw", Image._TYPE);
imageSubscriber = node.newSubscriber("/image_raw", Image._TYPE);
imageSubscriber.addMessageListener(new MessageListener<Image>() {
@Override
public void onNewMessage(Image message) {
CvImage cvImage;
try {
cvImage = CvImage.toCvCopy(message, ImageEncodings.RGB8);
} catch (Exception e) {
log.error("cv_bridge exception: " + e.getMessage());
return;
}
Log.i(TAG, Integer.toString(cvImage.image.cols()));
Log.i(TAG, Integer.toString(cvImage.image.rows()));
//make sure the picture is big enough for my circle.
if (cvImage.image.rows() > 110 && cvImage.image.cols() > 110) {
//place the circle in the middle of the picture with radius 100 and color red.
Imgproc.circle(cvImage.image, new Point(cvImage.image.cols() / 2, cvImage.image.rows() / 2), 100, new Scalar(255, 0, 0));
}
cvImage.image = cvImage.image.t();
Core.flip(cvImage.image, cvImage.image, 1);
bmp = Bitmap.createBitmap(cvImage.image.cols(), cvImage.image.rows(), Bitmap.Config.ARGB_8888);
Utils.matToBitmap(cvImage.image, bmp);
runOnUiThread(displayImage);
Core.flip(cvImage.image, cvImage.image, 1);
cvImage.image = cvImage.image.t();
try {
imagePublisher.publish(cvImage.toImageMsg(imagePublisher.newMessage()));
} catch (IOException e) {
log.error("cv_bridge exception: " + e.getMessage());
}
}
});
Log.i(TAG, "called onStart");
}
I played the bag file in my host computer with ROS_IP setting to 192.168.x.x and my app can successfully connect to the address.
However the imageView still shows nothing and
Log.i(TAG, Integer.toString(cvImage.image.cols()));,
Log.i(TAG, Integer.toString(cvImage.image.rows()));
has no info output.
It seems that the MessageListener didn't work and no message is received.
Did I miss something? Hope there's someone can help me! Thanks!
Below is my gradle file:
apply plugin: "com.android.library"
//noinspection GroovyAssignabilityCheck
dependencies {
compile "org.ros.rosjava_core:rosjava:[0.3,0.4)"
compile "org.ros.rosjava_messages:sensor_msgs:[1.12,1.13)"
compile "com.github.rosjava.rosjava_extras:image:[0.3,0.4)"
compile group: 'org.opencv', name: 'openCVLibrary', version: '3.4.0'
compile "org.ros.rosjava_messages:std_msgs:[0.5.11,0.6)"
compile "io.netty:netty:3.5.2.Final"
compile 'org.ros.rosjava_messages:geometry_msgs:[1.12, 1.13)'
compile 'org.ros.rosjava_messages:diagnostic_msgs:[1.12, 1.13)'
compile 'org.ros.rosjava_bootstrap:message_generation:[0.3, 0.4)'
compile "org.apache.commons:com.springsource.org.apache.commons.logging:[1.1.1,1.2)"
compile "org.ros.rosjava_messages:sensor_msgs:[1.12, 1.13)"
}
android {
defaultConfig {
minSdkVersion 16
}
}
apply plugin: 'com.android.application'
//noinspection GroovyAssignabilityCheck
dependencies {
compile 'org.ros.android_core:android_core_components:[0.4,0.5)'
compile project(":cv_bridge")
}
android {
defaultConfig {
minSdkVersion 16
//noinspection OldTargetApi
targetSdkVersion 28
}
}
And the RQT graph:
when I run rostopic echo /image_converter/output_video/raw:
Be consistent with android core.
Trying to compile android_extras and I am getting various errors complaining about missing resources.
Here is one example:
"Error retrieving parent for item: No resource found that matches the given name 'android:Widget.Material.Button.Borderless.Colored'."
@adamantivm Any ideas? Have you compiled android_extras?
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.