This repository contains Path planning of point robot for finding shortest path between start and goal position. Implemented Informed and Uninformed search algorithms for the path planning problem. A random 2D enironment is created with obstacles for evealuation of searching algorithms. A* and Dijkstras algorithm is implemented for obtaining the shortest path. Investigated the perofrmance by implementing other search based algorithms such as Best first, Depth First and Breadth First for finding the shortest distance. Given below are the images of search done by the various algorithms.
A*

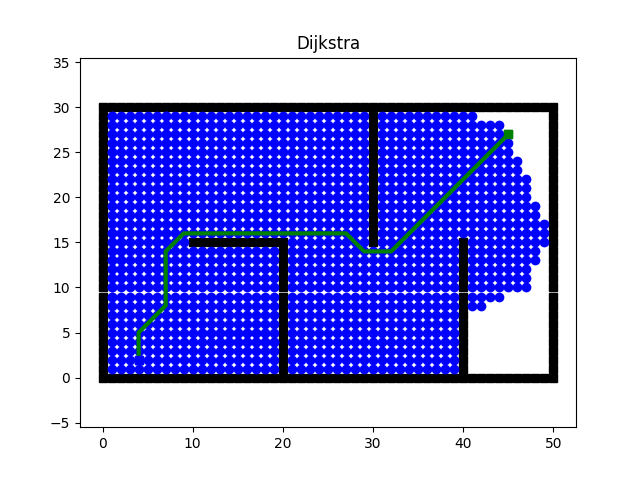
Dijkstra
Best First Search

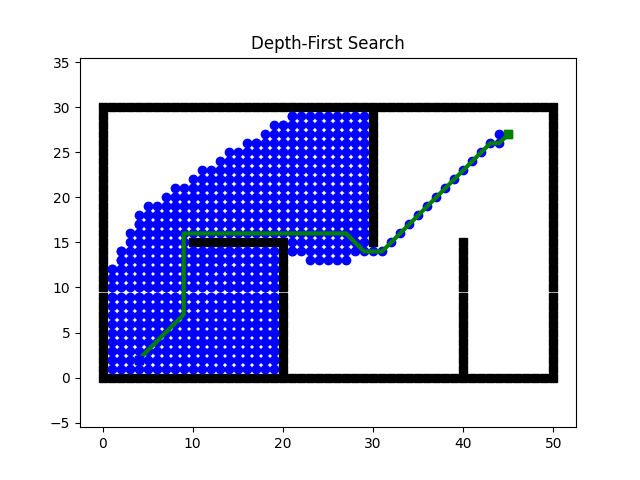
Depth-First Search
Breadth-First Search

