| header-includes | |||||||||
|---|---|---|---|---|---|---|---|---|---|
|
This repository contains the codes used for simulating the cases discussed in the manuscript: Bursting bubble in a viscoplastic medium. The results presented here are currently under review in Journal of Fluid Mechanics.
The supplementary videos are available here
We investigate the classical problem of bubble bursting at a liquid-gas interface, but now in the presence of a viscoplastic liquid medium. Here are the schematics of the problem. This simualtion will start from Figure 1(c).
 Figure: Schematics for the process of a bursting bubble: (a) A gas bubble in bulk. (b) The bubble approaches the free surface forming a liquid film (thickness
Figure: Schematics for the process of a bursting bubble: (a) A gas bubble in bulk. (b) The bubble approaches the free surface forming a liquid film (thickness
You need to install Basilisk C. Follow the installation steps here. In case of compatibility issues, please feel free to contact me: [email protected]. For post-processing codes, Python 3.X is required.
Github does not support native LaTeX rendering. So, you only see raw equations in this README file. To have a better understanding of the equations, please see README.pdf or visit my Basilisk Sandbox.
Id 1 is for the Viscoplastic liquid pool, and Id 2 is Newtonian gas.
#include "axi.h"
#include "navier-stokes/centered.h"
#define FILTERED // Smear density and viscosity jumpsTo model Viscoplastic liquids, we use a modified version of two-phase.h. two-phaseAxiVP.h contains these modifications.
#include "two-phaseAxiVP.h"You can use: conserving.h as well. Even without it, I was still able to conserve the total energy (also momentum?) of the system if I adapt based on curvature and vorticity/deformation tensor norm (see the adapt even). I had to smear the density and viscosity anyhow because of the sharp ratios in liquid (Bingham) and the gas.
#include "navier-stokes/conserving.h"
#include "tension.h"
#include "reduced.h"
#include "distance.h"We use a modified adapt-wavelet algorithm available (here). It is written by César Pairetti (Thanks :)).
#include "adapt_wavelet_limited.h"
#define tsnap (0.001)
// Error tolerancs
#define fErr (1e-3) // error tolerance in f1 VOF
#define KErr (1e-4) // error tolerance in f2 VOF
#define VelErr (1e-2) // error tolerances in velocity
#define OmegaErr (1e-3) // error tolerances in vorticity
// Numbers!
#define RHO21 (1e-3)
#define MU21 (2e-2)
#define Ldomain 8
// boundary conditions
u.n[right] = neumann(0.);
p[right] = dirichlet(0.);
int MAXlevel;
double Oh, Bond, tmax;
char nameOut[80], dumpFile[80];We consider the burst of a small axisymmetric bubble at a surface of an incompressible Bingham fluid. To nondimensionalise the governing equations, we use the initial bubble radius
where
where
Here,
int main(int argc, char const *argv[]) {
L0 = Ldomain;
origin (-L0/2., 0.);
init_grid (1 << 6);
// Values taken from the terminal
MAXlevel = atoi(argv[1]);
tauy = atof(argv[2]);
Bond = atof(argv[3]);
Oh = atof(argv[4]);
tmax = atof(argv[5]);
// Ensure that all the variables were transferred properly from the terminal or job script.
if (argc < 6){
fprintf(ferr, "Lack of command line arguments. Check! Need %d more arguments\n",6-argc);
return 1;
}
fprintf(ferr, "Level %d, Oh %2.1e, Tauy %4.3f, Bo %4.3f\n", MAXlevel, Oh, tauy, Bond);
// Create a folder named intermediate where all the simulation snapshots are stored.
char comm[80];
sprintf (comm, "mkdir -p intermediate");
system(comm);
// Name of the restart file. See writingFiles event.
sprintf (dumpFile, "dump");
mumax = 1e8*Oh; // The regularisation value of viscosity
rho1 = 1., rho2 = RHO21;
mu1 = Oh, mu2 = MU21*Oh;
f.sigma = 1.0;
G.x = -Bond;
run();
}
/**
This event is specific to César's adapt_wavelet_limited.
*/
int refRegion(double x, double y, double z){
return (y < 1.28 ? MAXlevel+2 : y < 2.56 ? MAXlevel+1 : y < 5.12 ? MAXlevel : MAXlevel-1);
}The initial shape of the bubble at the liquid-gas interface can be calculated by solving the Young-Laplace equations Lhuissier & Villermaux, 2012 and it depends on the
- Alex Berny's Sandbox
-
My Matlab code: Also see the results for different
$\mathcal{B}o$ number here.

Comparision of the initial shape calculated using the Young-Laplace equations. Ofcourse, for this study, we only need:
Since we do not focus on the influence of
Note: The curvature diverges at the cavity-free surface intersection. We fillet this corner to circumvent this singularity, introducing a rim with a finite curvature that connects the bubble to the free surface. We ensured that the curvature of the rim is high enough such that the subsequent dynamics are independent of its finite value.
event init (t = 0) {
if (!restore (file = dumpFile)){
char filename[60];
sprintf(filename,"Bo%5.4f.dat",Bond);
FILE * fp = fopen(filename,"rb");
if (fp == NULL){
fprintf(ferr, "There is no file named %s\n", filename);
return 1;
}
coord* InitialShape;
InitialShape = input_xy(fp);
fclose (fp);
scalar d[];
distance (d, InitialShape);
while (adapt_wavelet_limited ((scalar *){f, d}, (double[]){1e-8, 1e-8}, refRegion).nf);
/**
The distance function is defined at the center of each cell, we have
to calculate the value of this function at each vertex. */
vertex scalar phi[];
foreach_vertex(){
phi[] = -(d[] + d[-1] + d[0,-1] + d[-1,-1])/4.;
}
/**
We can now initialize the volume fraction of the domain. */
fractions (phi, f);
}
}We adapt based on curvature,
We also adapt based on vorticity in the liquid domain. I have noticed that this refinement helps resolve the fake-yield surface accurately (see the black regions in the videos below).
event adapt(i++){
scalar KAPPA[], omega[];
curvature(f, KAPPA);
vorticity (u, omega);
foreach(){
omega[] *= f[];
}
boundary ((scalar *){KAPPA, omega});
adapt_wavelet_limited ((scalar *){f, u.x, u.y, KAPPA, omega},
(double[]){fErr, VelErr, VelErr, KErr, OmegaErr},
refRegion);
}At higher
Note:
// adapt_wavelet_limited ((scalar *){f, u.x, u.y, KAPPA, D2},
// (double[]){fErr, VelErr, VelErr, KErr, 1e-3},
// refRegion);event writingFiles (t = 0; t += tsnap; t <= tmax) {
dump (file = dumpFile);
sprintf (nameOut, "intermediate/snapshot-%5.4f", t);
dump(file=nameOut);
}event end (t = end) {
fprintf(ferr, "Done: Level %d, Oh %2.1e, Tauy %4.3f, Bo %4.3f\n", MAXlevel, Oh, tauy, Bond);
}event logWriting (i+=100) {
double ke = 0.;
foreach (reduction(+:ke)){
ke += (2*pi*y)*(0.5*(f[])*(sq(u.x[]) + sq(u.y[])))*sq(Delta);
}
static FILE * fp;
if (i == 0) {
fprintf (ferr, "i dt t ke\n");
fp = fopen ("log", "w");
fprintf (fp, "i dt t ke\n");
fprintf (fp, "%d %g %g %g\n", i, dt, t, ke);
fclose(fp);
} else {
fp = fopen ("log", "a");
fprintf (fp, "%d %g %g %g\n", i, dt, t, ke);
fclose(fp);
}
fprintf (ferr, "%d %g %g %g\n", i, dt, t, ke);
if (ke > 1e3 || ke < 1e-6){
if (i > 1e2){
return 1;
}
}
}#!/bin/bash
qcc -fopenmp -Wall -O2 burstingBubble.c -o burstingBubble -lm
export OMP_NUM_THREADS=8
./burstingBubble 10 0.25 1e-3 1e-2 5.0The post-processing codes and simulation data are available at: PostProcess
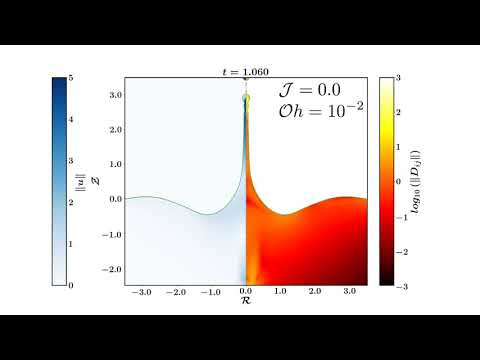
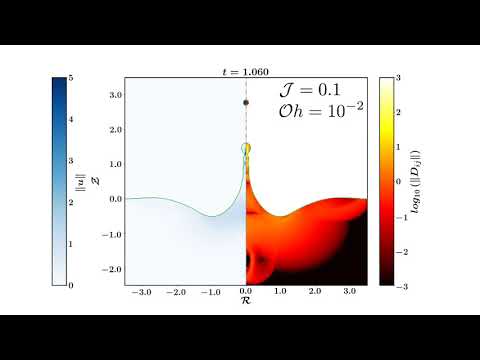
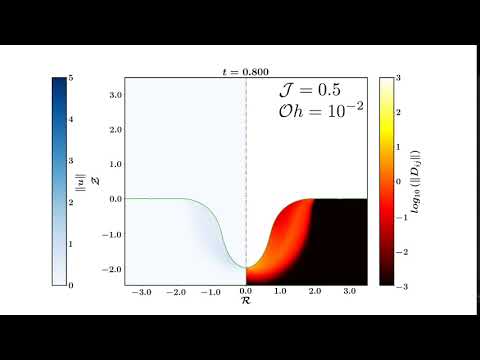
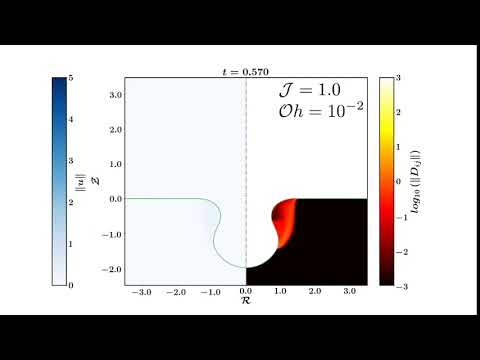
Bursting bubble dynamics for different capillary-Bingham numbers. (a)
This is a modified version of two-phase.h. It contains the implementation of
Viscoplastic Fluid (Bingham Fluid).
This file helps setup simulations for flows of two fluids separated by
an interface (i.e. immiscible fluids). It is typically used in
combination with a Navier--Stokes solver.
The interface between the fluids is tracked with a Volume-Of-Fluid
method. The volume fraction in fluid 1 is
#include "vof.h"
scalar f[], * interfaces = {f};
scalar D2[];
face vector D2f[];
double rho1 = 1., mu1 = 0., rho2 = 1., mu2 = 0.;
double mumax = 0., tauy = 0.;
/**
Auxilliary fields are necessary to define the (variable) specific
volume $\alpha=1/\rho$ as well as the cell-centered density. */
face vector alphav[];
scalar rhov[];
event defaults (i = 0) {
alpha = alphav;
rho = rhov;
/**
If the viscosity is non-zero, we need to allocate the face-centered
viscosity field. */
if (mu1 || mu2)
mu = new face vector;
}
/**
The density and viscosity are defined using arithmetic averages by
default. The user can overload these definitions to use other types of
averages (i.e. harmonic). */
#ifndef rho
# define rho(f) (clamp(f,0.,1.)*(rho1 - rho2) + rho2)
#endif
#ifndef mu
# define mu(muTemp, mu2, f) (clamp(f,0.,1.)*(muTemp - mu2) + mu2)
#endif
/**
We have the option of using some "smearing" of the density/viscosity
jump. */
#ifdef FILTERED
scalar sf[];
#else
# define sf f
#endifThis is part where we have made changes.
$$\mathcal{D}{12} = \mathcal{D}{23} = 0.$$ The second invariant is $\mathcal{D}2=\sqrt{\mathcal{D}{ij}\mathcal{D}_{ij}}$ (this is the Frobenius norm)
$$\mathcal{D}2^2= \mathcal{D}{ij}\mathcal{D}{ij}= \mathcal{D}{11}\mathcal{D}{11} + \mathcal{D}{22}\mathcal{D}{22} + \mathcal{D}{13}\mathcal{D}{31} + \mathcal{D}{31}\mathcal{D}{13} + \mathcal{D}{33}\mathcal{D}_{33}$$
Note:
We use the formulation as given in Balmforth et al. (2013), they use
Therefore,
Factorising with
$$\tau_{ij} = 2( \mu_0 + \frac{\tau_y}{2 |\mathcal{D}| } ) D_{ij}=2( \mu_0 + \frac{\tau_y}{\sqrt{2} \mathcal{D}2 } ) \mathcal{D}{ij} $$
As defined by Balmforth et al. (2013)
with
Finally, mu is the min of of
The fluid flows always, it is not a solid, but a very viscous fluid. $$ \mu = \text{min}\left(\mu_{eq}, \mu_{max}\right) $$
Reproduced from: P.-Y. Lagrée's Sandbox. Here, we use a face implementation of the regularisation method, described here.
event properties (i++) {
/**
When using smearing of the density jump, we initialise *sf* with the
vertex-average of *f*. */
#ifndef sf
#if dimension <= 2
foreach()
sf[] = (4.*f[] +
2.*(f[0,1] + f[0,-1] + f[1,0] + f[-1,0]) +
f[-1,-1] + f[1,-1] + f[1,1] + f[-1,1])/16.;
#else // dimension == 3
foreach()
sf[] = (8.*f[] +
4.*(f[-1] + f[1] + f[0,1] + f[0,-1] + f[0,0,1] + f[0,0,-1]) +
2.*(f[-1,1] + f[-1,0,1] + f[-1,0,-1] + f[-1,-1] +
f[0,1,1] + f[0,1,-1] + f[0,-1,1] + f[0,-1,-1] +
f[1,1] + f[1,0,1] + f[1,-1] + f[1,0,-1]) +
f[1,-1,1] + f[-1,1,1] + f[-1,1,-1] + f[1,1,1] +
f[1,1,-1] + f[-1,-1,-1] + f[1,-1,-1] + f[-1,-1,1])/64.;
#endif
#endif
#if TREE
sf.prolongation = refine_bilinear;
boundary ({sf});
#endif
foreach_face(x) {
double ff = (sf[] + sf[-1])/2.;
alphav.x[] = fm.x[]/rho(ff);
double muTemp = mu1;
face vector muv = mu;
double D11 = 0.5*( (u.y[0,1] - u.y[0,-1] + u.y[-1,1] - u.y[-1,-1])/(2.*Delta) );
double D22 = (u.y[] + u.y[-1, 0])/(2*max(y, 1e-20));
double D33 = (u.x[] - u.x[-1,0])/Delta;
double D13 = 0.5*( (u.y[] - u.y[-1, 0])/Delta + 0.5*( (u.x[0,1] - u.x[0,-1] + u.x[-1,1] - u.x[-1,-1])/(2.*Delta) ) );
double D2temp = sqrt( sq(D11) + sq(D22) + sq(D33) + 2*sq(D13) );
if (D2temp > 0. && tauy > 0.){
double temp = tauy/(sqrt(2.)*D2temp) + mu1;
muTemp = min(temp, mumax);
} else {
if (tauy > 0.){
muTemp = mumax;
} else {
muTemp = mu1;
}
}
muv.x[] = fm.x[]*mu(muTemp, mu2, ff);
D2f.x[] = D2temp;
}
foreach_face(y) {
double ff = (sf[0,0] + sf[0,-1])/2.;
alphav.y[] = fm.y[]/rho(ff);
double muTemp = mu1;
face vector muv = mu;
double D11 = (u.y[0,0] - u.y[0,-1])/Delta;
double D22 = (u.y[0,0] + u.y[0,-1])/(2*max(y, 1e-20));
double D33 = 0.5*( (u.x[1,0] - u.x[-1,0] + u.x[1,-1] - u.x[-1,-1])/(2.*Delta) );
double D13 = 0.5*( (u.x[0,0] - u.x[0,-1])/Delta + 0.5*( (u.y[1,0] - u.y[-1,0] + u.y[1,-1] - u.y[-1,-1])/(2.*Delta) ) );
double D2temp = sqrt( sq(D11) + sq(D22) + sq(D33) + 2*sq(D13) );
if (D2temp > 0. && tauy > 0.){
double temp = tauy/(sqrt(2.)*D2temp) + mu1;
muTemp = min(temp, mumax);
} else {
if (tauy > 0.){
muTemp = mumax;
} else {
muTemp = mu1;
}
}
muv.y[] = fm.y[]*mu(muTemp, mu2, ff);
D2f.y[] = D2temp;
}
/**
I also calculate a cell-centered scalar D2, where I store $\|\mathbf{\mathcal{D}}\|$. This can also be used for refimnement to accurately refine the fake-yield surfaces.
*/
foreach(){
rhov[] = cm[]*rho(sf[]);
D2[] = (D2f.x[]+D2f.y[]+D2f.x[1,0]+D2f.y[0,1])/4.;
if (D2[] > 0.){
D2[] = log(D2[])/log(10);
} else {
D2[] = -10;
}
}
boundary(all);
#if TREE
sf.prolongation = fraction_refine;
boundary ({sf});
#endif
}