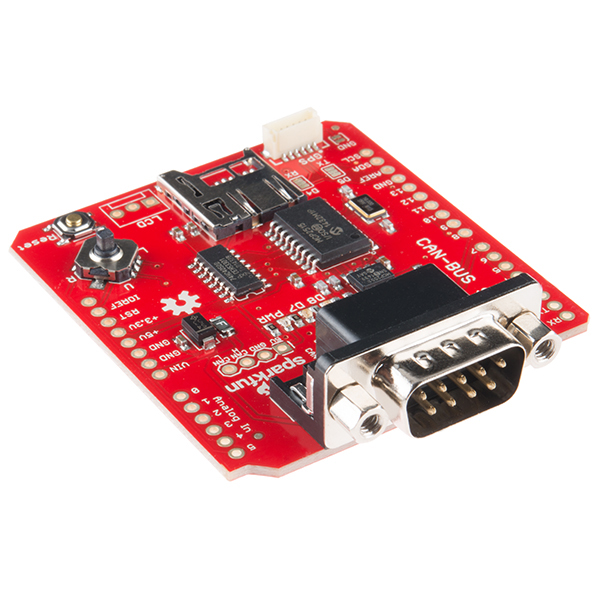
SparkFun CAN-Bus Shield (DEV-13262)
Arduino library for using all features of the CAN-Bus Shield.
- /examples - Example sketches for the library (.ino). Run these from the Arduino IDE.
- /extras - Additional documentation for the user. These files are ignored by the IDE.
- /src - Source files for the library (.cpp, .h).
- keywords.txt - Keywords from this library that will be highlighted in the Arduino IDE.
- library.properties - General library properties for the Arduino package manager.
- Installing an Arduino Library Guide - Basic information on how to install an Arduino library.
- Product Repository - Main repository (including hardware files) for the CAN-Bus Shield.
- Hookup Guide - Basic hookup guide for the CAN-Bus Shield.
- DEV-13262- CAN-Bus Shield.
This product is open source!
Please review the LICENSE.md file for license information.
If you have any questions or concerns on licensing, please contact [email protected].
Distributed as-is; no warranty is given.
- Your friends at SparkFun.