
This repository holds the combined work of Nagoya University, Tokushima University and Aisin Seiki.
The implemented system combines autonomous driving software Autoware (originally developed at Nagoya University, now under the Autoware Foundation), with voice understanding and synthesis developed at Tokushima University, 3D gaze direction understanding and its relation with 3D world done at Nagoya University, all supported by a driver gesture recognition system developed at Aisin Seiki.
The following functions are implemented in our system:
-
Automatic departure using verbal interaction to specify destination and gesture recognition (nodding) to confirm or negate destinations suggested by the car. After destination is confirmed the vehicle performs path planning to find the best route towards the destination and engages autonomous driving mode.
-
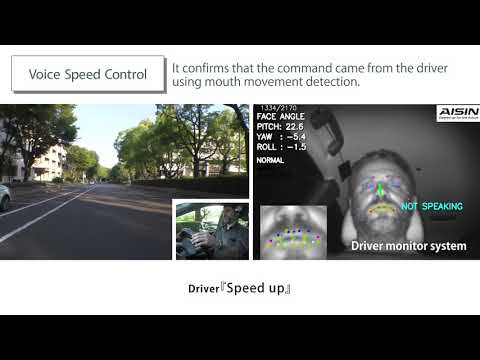
Voice speed control allows using verbal commands such as "slow down" or "speed up" to effectively control the vehicle speed. Local planning software takes the user speed control commands into consideration to generate corresponding speed profiles for the vehicle.
-
Dynamic on-route changes using verbal commands such as "turn right" or "go straight", with corresponding re-planning towards the destination. Route change execution is not inmediate but requires a margin distance for safety considerations. Voice route change can be combined with voice speed control and others.
-
Interaction with vehicle is enhanced through voice and gaze to inquire the system about the immediate surrounding environment. Driver can as the vehicle questions such as "what is that?", taking into consideration current gaze direction; the car uses 3D gaze information together with semantic 3D maps to reply to the driver about objects.
-
Similarly, voice and gaze can be used to specify where the car has to park. The driver issue commands such as "stop over there" to the vehicle takes into account the gaze direction to execute the stop command.
## Driver monitor system
## Connection configuration
 The figure shows the connection of the different processing elements.
The figure shows the connection of the different processing elements.
The HMI block consists on the voice processing and the gaze processing systems, each running on its own computer. Voice processing has a microphone as input and a visual feedback module to denote when the car has received a voice command and when the car is talking to the driver. Gaze processing is connected to the AISIN driver gesture recognition system, it also includes semantic 3D maps for gaze-to-object association.
The Autoware block consists on the vehicle localization, perception, path planning and other modules. It connects to sensors such as Velodyne HDL-32E for localization, includes 3D maps for localization and vector maps (HD-maps) for path planning. We customized Autoware to interface with the HMI block through network sockets. Autoware runs on a separate computer.
The Vehicle control block is the last mile connecting Autoware with the vehicle's steering, brake and acceleration. On our experiments we used a Toyota Prius and a ZMP control box.
The software includes:
- Autoware: fork of CPFL/Autoware modified for our system
- HMI: software for speech recognition and synthesis
- Gaze: software for 3D gaze processing
- Maps: point-cloud maps and vector maps
This software was developed and tested on the following environment:
- Toyota Prius PHV
- CPU Intel Xeon E3-1545M 8 cores
- 32GB RAM
- NVIDIA M1000M with 4GB GPU RAM
- ROS kinetic (Ubuntu 16.04)
- (Unreal engine version and computer specs?)
- (HMI software and computer specs?)
- (AISIN hardware?)
- Get the software
$ cd $HOME
$ git clone https://github.com/Harmoware/Harmoware-HMI.git --recurse-submodules
- Build Autoware
$ cd ~/Harmoware-HMI/Autoware
$ git submodule update --init --recursive
$ git branch feature/Harmoware-HMI
$ cd ros/src
$ catkin_init_workspace
$ cd ../
$ ./catkin_make_release
- Build HMI
here are the commands to install
- Build Gaze
here are the commands to install
- Autoware
$ cd ~/Harmoware-HMI/Autoware/ros
$ ./run
- HMI
how to start it?
- Gaze
how to start it?

NHK (2018.10.25) 車と対話型自動運転システム開発|NHK 東海のニュース
Chukyo TV (2018.10.25) 声や身ぶりなどで車を自動運転、名古屋大などが共同開発
Multimodal communication enabled autonomous vehicle
マルチモーダル対話型自動運転


