
透視變形是指一般在拍攝影片、照片的時候,你可以看到一個物體及其周圍區域與標準鏡頭中看到的相比完全不同,由於遠近特徵的相對比例變化,發生了彎曲或變形。所以通常我們在自然背景拍攝一張照片時,或多或少都會有一些透視變形存在,而透視變形是由拍攝和觀看圖像的相對距離決定的,因為成像的視角也許會比觀看物體的視角更窄或是更廣,這樣看上去的相對距離就會與所期待的不一樣。
輸入一張圖,輸入x1,x2,x3,x4,y1,y2,y3,y4 八個點位做透視變形校正
參數
position1: input_image_path
position2: x1,x2,x3,x4,y1,y2,y3,y4
調用範例:
python perspective.py ./test/Perspective_4.png 258,247,650,633,271,555,261,534
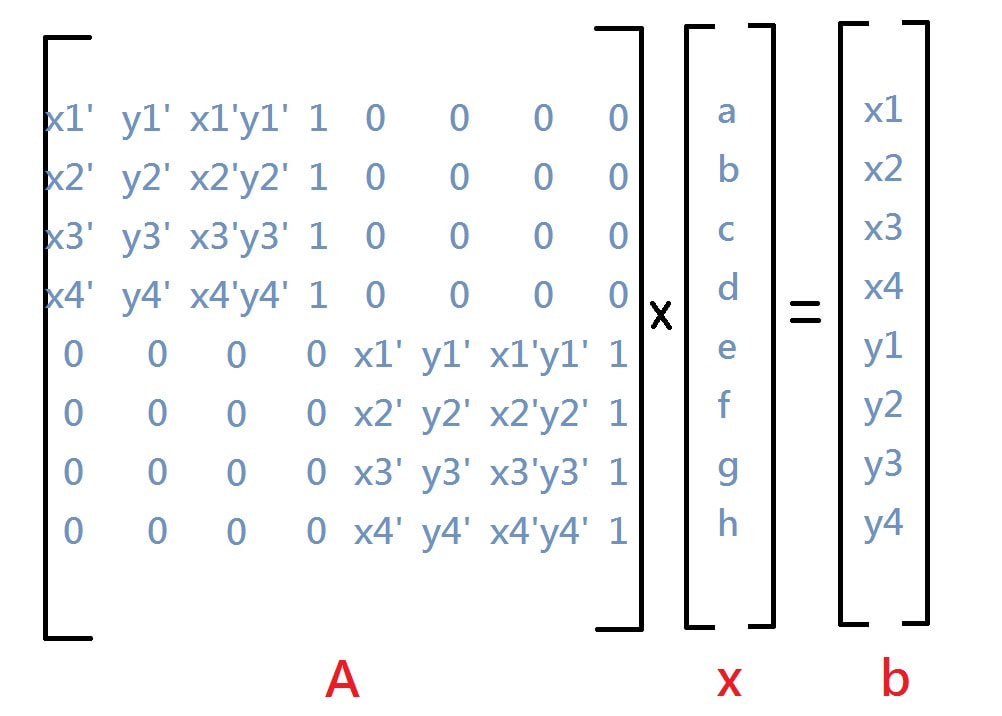
最主要是要解 Ax=b這個問題
首先定義兩個class,表示四個角定位及x,y點位
- Corner
- Point
class Corner:
def __init__(self, r, c):
self.r = r
self.c = c
def get_corner(self):
return [Point(0, 0),
Point(self.r - 1, 0),
Point(0, self.c - 1),
Point(self.r - 1, self.c - 1)]
class Point:
def __init__(self, x, y):
self.x = x
self.y = y傳入corner代表4角定位,傳入一個A矩陣進行初始化
def init_A(A, corner, max_matrix):
for i in range(max_matrix):
if i < 4:
A[i, 0] = corner[i].x
A[i, 1] = corner[i].y
A[i, 2] = corner[i].x * corner[i].y
A[i, 3] = 1
else:
A[i, 4] = corner[i - 4].x
A[i, 5] = corner[i - 4].y
A[i, 6] = corner[i - 4].x * corner[i - 4].y
A[i, 7] = 1這個方法主要是用高斯消去法解出 b 裡面的八個參數
def gauss_jordan(A, b):
"""
高斯消去法
:return: b
"""
i, j, k, s = 0, 0, 0, 0
# l = np.zeros((MAX_MATRIX, MAX_MATRIX), dtype=np.float64)
max_matrix = A.shape[0]
l = np.zeros((max_matrix, max_matrix), dtype=np.float64)
for k in range(max_matrix - 1):
s = k
r = fabs(A[k, k])
for i in range(k, max_matrix):
if r < fabs(A[i, k]):
r = fabs(A[i, k])
s = i
if s != k:
A[[k, s]] = A[[s, k]] # 交換 k row 和 s row
b[k], b[s] = b[s], b[k]
for i in range(k + 1, max_matrix):
l[i, k] = A[i, k] / A[k, k]
for j in range(k, max_matrix):
A[i, j] = A[i, j] - l[i, k] * A[k, j]
b[i] = b[i] - l[i, k] * b[k]
if A[k, k] < 0.0001:
print("Error!Can not find the solution!")
exit(1)
for i in range(max_matrix - 1, -1, -1):
u = 0
for j in range(i + 1, max_matrix):
u = u + A[i, j] * b[j]
b[i] = (b[i] - u) / A[i, i]
return b這個方法主要傳入八個參數及原圖及輸出圖,代公代並採用invert mapping進行最後輸出
def invert_mapping(b, input_img, output_img):
rows = output_img.shape[0]
cols = output_img.shape[1]
for i in range(rows):
for j in range(cols):
double_y = ((b[0] * i) + (b[1] * j) + (b[2] * i * j) + b[3])
double_x = ((b[4] * i) + (b[5] * j) + (b[6] * i * j) + b[7])
y = int(double_y)
x = int(double_x)
v = (double_y - y)
u = (double_x - x)
for c in range(3):
# f(x,y) = (1-u)(1-v)g(x,y) + u(1-v)g(x,y+1) + v(1-u)g(x+1,y) + uvg(x+1,y+1)
output_img[i, j, c] = (1 - u) * (1 - v) * input_img[x, y][c] + \
u * (1 - v) * input_img[x, y + 1][c] + \
v * (1 - u) * input_img[x + 1, y][c] + \
u * v * input_img[x + 1, y + 1][c]- 取得輸出圖片
out_x、out_y產生output_img - 調用
init_A組裝出Ax=b相關必要參數 - 調用
gauss_jordan求出八個參數 - 最後調用
invert_mapping得出輸出圖
def main():
img_path = sys.argv[1]
input_img = cv2.imread(img_path)
max_matrix = 8
# b = [404, 275, 3376, 3520, 1077, 1636, 1198, 1674] #Perspective_2.jpg
# b = [66, 54, 1092, 1100, 174, 904, 61, 948] #Perspective_3.jpg
# x1,x2,x3,x4,y1,y2,y3,y4
b = [int(b) for b in sys.argv[2].split(',')]
A = np.zeros((max_matrix, max_matrix), dtype=np.float64)
out_x = abs(b[3] - b[0])
out_y = abs(b[4] - b[5])
output_img = np.zeros((out_y, out_x, 3), dtype=input_img.dtype) # Perspective_3.jpg
rows = output_img.shape[0]
cols = output_img.shape[1]
corner = Corner(rows, cols).get_corner()
init_A(A, corner, max_matrix)
b = gauss_jordan(A, b)
[print(f'b[{i}]={b[i]}') for i in range(max_matrix)]
invert_mapping(b, input_img, output_img)
cv2.imshow("Perspective_source", input_img)
cv2.imshow("Perspective_process", output_img)
# 隨意Key一鍵結束程式
cv2.waitKey(0)
cv2.destroyAllWindows()




譔寫高斯消去法求八個參數是這個作業我遇到最大的難題,尋找許多資料及參考公式才兜出來,完成HW1以後覺的很有成就感。
後續試了許多照片,一開始比例都會跑掉,所以又想了一個算法自動去計算寬高使它可以自動計算比例
如今它已經被我整理完放上github成為我的工具類,後續還會研發更多的影像處理算法。
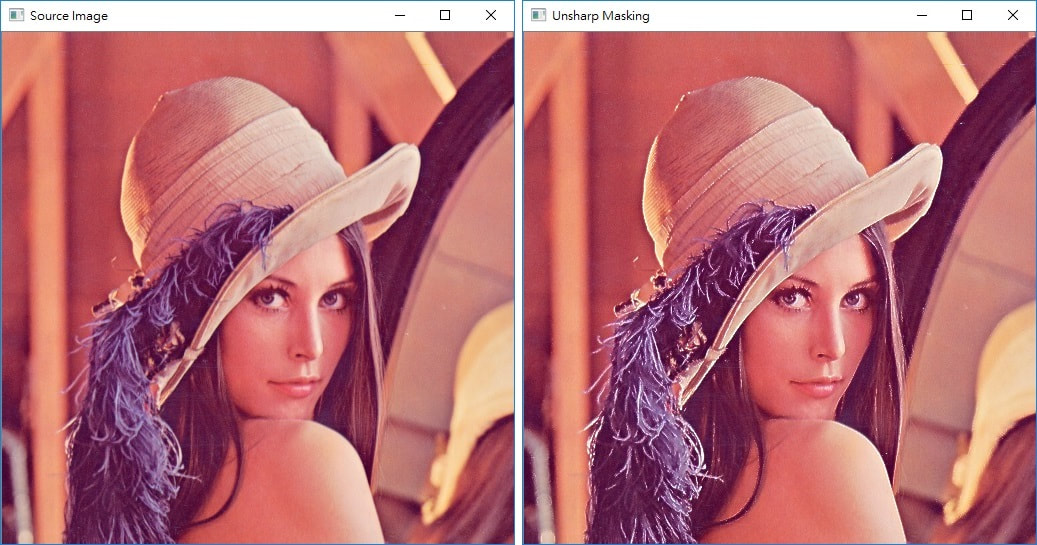
銳化指的是增強原始影像中的某一些細節(detail),透過設計一個Mask 把它罩在影像的邊緣上 ,然後針對邊緣的部分做sharpening 的動作,其餘的不是邊緣的地方我們就把它給略過,進而避免把平坦區的雜訊放大。
參數
position1: input_image_path
position2: threshold 閥值
調用範例:
python unsharp.py ./test/Lena_2.png 128
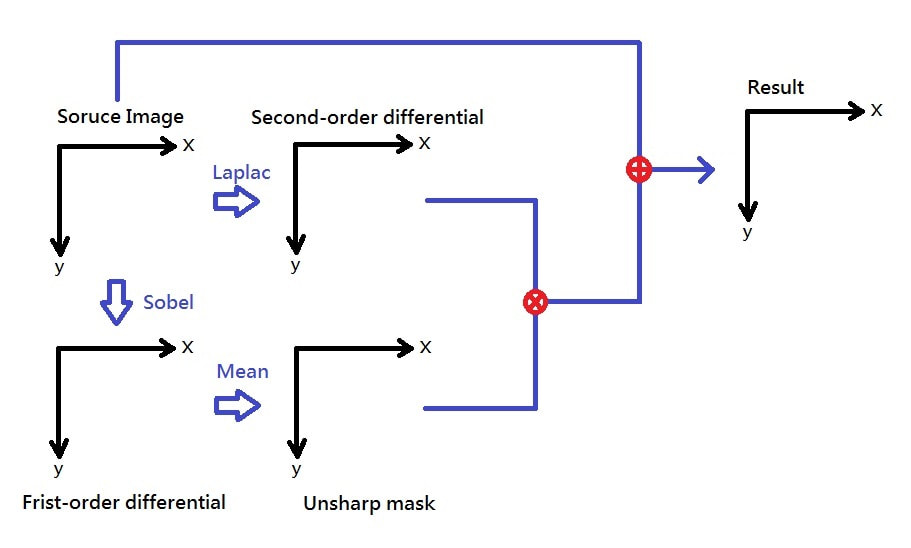
一張原始影像(Source Image)進來,我們對它做 Unsharp Mashing,步驟如下:
- 程式載入一張原始影像,若為"彩色影像"則將它轉成"灰階影像",得
gray_img - 對
gray_img做 Sobel Operator,會得到一張一階維分的diff_1_img - 對
gray_img做 Laplace Operator ,會得到一張二階維分的diff_2_img - 對
diff_1_img做 算術平均濾波(Mean Filter),得到mean_img - 將
diff_2_img與mean_img做相乘的動作,得到我們真正要 Enhance 的數值e - 用
e對 原始影像(Source Image) 做 Enhancement,得到 Unsharp Masking 結果
該類封裝了mean、sobel、laplace等mask結構,封裝了convolution 並提供以下主要功能
- get_diff_1:傳入一張圖片,調用
sobel x mask、sobel y mask,回傳一階微分後的結果 - get_diff_2:傳入一張圖片,調用
laplace mask回傳二階微分後的結果 - mean_filter:傳入一張圖片,調用
mean_mask並回傳結果 - enhancement:傳入原圖、二階微分圖、平均濾波圖 回傳
Unsharp Masking的結果
class ConvolutionType(Enum):
MeanFilter = 1
Sobel_X = 2
Sobel_Y = 3
Laplace = 4
class UnsharpService:
def __init__(self, threshold):
self.__threshold = threshold
self.__mean_mask = [1, 1, 1,
1, 1, 1,
1, 1, 1]
self.__sobel_x_mask = [-1, 0, 1,
-2, 0, 2,
-1, 0, 1]
self.__sobel_y_mask = [-1, -2, -1,
0, 0, 0,
1, 2, 1]
self.__laplace_mask = [-1, -1, -1,
-1, 8, -1,
-1, -1, -1]
def mean_filter(self, img):
"""
算術平均濾波
:param img:
:return:
"""
rows = img.shape[0]
cols = img.shape[1]
mean_img = np.zeros((rows, cols), dtype=img.dtype)
self.__convolution(img, mean_img, self.__mean_mask, ConvolutionType.MeanFilter)
return mean_img
def __sobel_y(self, src, out):
self.__convolution(src, out, self.__sobel_y_mask, ConvolutionType.Sobel_Y)
def __sobel_x(self, src, out):
self.__convolution(src, out, self.__sobel_x_mask, ConvolutionType.Sobel_X)
def get_diff_1(self, img):
"""
一階微分
:param img:
:return:
"""
rows = img.shape[0]
cols = img.shape[1]
sobel_y_img = np.zeros((rows, cols), dtype=img.dtype)
sobel_x_img = np.zeros((rows, cols), dtype=img.dtype)
diff_1_img = np.zeros((rows, cols), dtype=img.dtype)
self.__sobel_y(img, sobel_y_img) # sobel y
self.__sobel_x(img, sobel_x_img) # sobel x
for i in range(1, rows - 1):
for j in range(1, cols - 1):
# print(f"a,b={diff_1_img[i, j]},{diff_2_img[i, j]}")
sobel = int(sobel_x_img[i, j]) + int(sobel_y_img[i, j])
# if sobel > 255:
# print(sobel)
# print(f"i,j={i},{j}")
diff_1_img[i, j] = self.__chk_val(sobel)
return diff_1_img
def get_diff_2(self, img):
"""
二階微分
:param img:
:return:
"""
rows = img.shape[0]
cols = img.shape[1]
diff_2_img = np.zeros((rows, cols), dtype=img.dtype)
self.__laplace(img, diff_2_img)
return diff_2_img
def __laplace(self, src, out):
self.__convolution(src, out, self.__laplace_mask, ConvolutionType.Laplace)
def __convolution(self, src, out, mask, conv_type):
rows = out.shape[0]
cols = out.shape[1]
for i in range(1, rows - 1):
for j in range(1, cols - 1):
conv = mask[0] * src[i - 1, j - 1] + \
mask[1] * src[i - 1, j] + \
mask[2] * src[i - 1, j + 1] + \
mask[3] * src[i, j - 1] + \
mask[4] * src[i, j] + \
mask[5] * src[i, j + 1] + \
mask[6] * src[i + 1, j - 1] + \
mask[7] * src[i + 1, j] + \
mask[8] * src[i + 1, j + 1]
if conv_type == ConvolutionType.MeanFilter:
conv = conv / 9
conv = 255 if conv > self.__threshold else 0
elif conv_type == ConvolutionType.Sobel_X or conv_type == ConvolutionType.Sobel_Y:
conv = sqrt(pow(conv, 2))
out[i, j] = self.__chk_val(conv)
def enhancement(self, src, diff_2_img, mean_img):
for i in range(1, diff_2_img.shape[0] - 1):
for j in range(diff_2_img.shape[1] - 1):
for c in range(3):
# 求得 Enhance 的數值 `e`
src[i, j, c] = self.__chk_val(src[i, j, c] + (diff_2_img[i, j] * (mean_img[i, j] / 255)))
return src
@staticmethod
def __chk_val(v):
if v > 255:
return 255
if v < 0:
return 0
return v- 取得原圖(input_img)並進行灰階處理得到:
gray_img - 調用UnsharpService.get_diff_1 進行一階微分得:
diff_1_img - 調用UnsharpService.get_diff_2 進行二階微分得:
diff_2_img - 調用UnsharpService.mean_filter 進行平均濾波得:
mean_img - 調用UnsharpService.enhancement 得:
enha_img,此為非銳化濾波 Unsharp Masking的結果
def main():
img_path = sys.argv[1]
threshold = int(sys.argv[2])
input_img = cv2.imread(img_path)
cv2.imshow("Unsharp_source", input_img)
gray_img = cv2.cvtColor(input_img, cv2.COLOR_BGR2GRAY)
service = UnsharpService(threshold=threshold)
diff_1_img = service.get_diff_1(gray_img)
diff_2_img = service.get_diff_2(gray_img)
mean_img = service.mean_filter(diff_1_img) # unsharp mask
enha_img = service.enhancement(input_img, diff_2_img, mean_img)
cv2.imshow("Unsharp_diff_1_img", diff_1_img) # sobel
cv2.imshow("Unsharp_mean_img", mean_img) # mean sobel
cv2.imshow("Unsharp_diff_2_img", diff_2_img) # laplac
cv2.imshow("Unsharp_UnsharpMasking", enha_img)
# 隨意Key一鍵結束程式
cv2.waitKey(0)
cv2.destroyAllWindows()

非銳化濾鏡 Unsharp Masking 這個作業讓我了解到直接做一些的Unsharp會導致雜訊問題。當中遇到最大的問題是convolution的實作,兩個迴圈的走訪會有點混亂,進行完convolution還要做MeanFilter、laplace也遇到許多問題
後續開始研究一階微分、二分微分、邊緣偵測這些sobel運算、以及Laplace Operator還有平均濾波
這些組合起來竟然可以做到 Unsharp Masking,令我嘆為觀止,學到寶貴一課。
參數
position1: input_image_path
position2: element_size
調用範例:
python boundary.py ./test/staff.png 3
執行結果

參數
position1: input_image_path
position2: element_size
調用範例:
python regionfilling.py ./test/RegionFilling.png 3
執行結果



訓練「CNN」模型進行影像二元分類,本次作業為對室內及室外進行分類

Colab: https://colab.research.google.com/drive/1UE25OtvfwhRnKFtZMSScqw3hw4iD3vgd#scrollTo=2RZiZHyiAZsW
Dataset:
https://drive.google.com/file/d/1EmDy1ceebJKtQUZ0heZqy2y3iimxVXan/view?usp=sharing
訓練結果:
Test Loss: 0.486845 Test Accuracy: 81% (65/80)
先Initialize,進行初始化及載入必要組件,包含pytorch、sklearn、tqdm及連接 google drive
載入資料並show 出圖片確認資料集

定義 CNN model
class CNN_Model(nn.Module):
def __init__(self):
super(CNN_Model, self).__init__()
# Convolution 1 , input_shape=(3,224,224)
self.cnn1 = nn.Conv2d(in_channels=3, out_channels=16, kernel_size=5, stride=1, padding=0) #output_shape=(16,220,220) #(224-5+1)/1 #(weigh-kernel+1)/stride 無條件進位
self.relu1 = nn.ReLU() # 採用ReLU 激勵函數
# Max pool 1
self.maxpool1 = nn.MaxPool2d(kernel_size=2) #output_shape=(16,110,110) #(220/2)
# Convolution 2
self.cnn2 = nn.Conv2d(in_channels=16, out_channels=32, kernel_size=5, stride=1, padding=0) #output_shape=(32,106,106)
self.relu2 = nn.ReLU()
# Max pool 2
self.maxpool2 = nn.MaxPool2d(kernel_size=2) #output_shape=(32,53,53)
# Convolution 3
self.cnn3 = nn.Conv2d(in_channels=32, out_channels=16, kernel_size=3, stride=1, padding=0) #output_shape=(16,51,51)
self.relu3 = nn.ReLU()
# Max pool 3
self.maxpool3 = nn.MaxPool2d(kernel_size=2) #output_shape=(16,25,25)
# Convolution 4
self.cnn4 = nn.Conv2d(in_channels=16, out_channels=8, kernel_size=3, stride=1, padding=0) #output_shape=(8,23,23)
self.relu4 = nn.ReLU()
# Max pool 4
self.maxpool4 = nn.MaxPool2d(kernel_size=2) #output_shape=(8,11,11)
# Fully connected 1 ,#input_shape=(8*12*12)
self.fc1 = nn.Linear(8 * 11 * 11, 512)
self.relu5 = nn.ReLU()
self.fc2 = nn.Linear(512, 2)
self.output = nn.Softmax(dim=1)
def forward(self, x):
out = self.cnn1(x) # Convolution 1
out = self.relu1(out)
out = self.maxpool1(out)# Max pool 1
out = self.cnn2(out) # Convolution 2
out = self.relu2(out)
out = self.maxpool2(out) # Max pool 2
out = self.cnn3(out) # Convolution 3
out = self.relu3(out)
out = self.maxpool3(out) # Max pool 3
out = self.cnn4(out) # Convolution 4
out = self.relu4(out)
out = self.maxpool4(out) # Max pool 4
out = out.view(out.size(0), -1) # last CNN faltten con. Linear NN
out = self.fc1(out) # Linear function (readout)
out = self.fc2(out)
out = self.output(out)
return outepoch:設定5 lr設定:0.001 batchSize:32 criterion:CrossEntropyLoss optimizer:Adam
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr = LR) # 使用Adam優化器
epoch = 5
valid_loss_min = np.Inf # track change in validation loss
for epoch in range(1, epoch + 1):
# keep track of training and validation loss
train_loss = 0.0
valid_loss = 0.0
print('running epoch: {}'.format(epoch))
# enable train mode
model.train()
for data, target in tqdm(train_loader):
if device:
data, target = data.cuda(), target.cuda()
optimizer.zero_grad() # 梯度歸零
output = model(data)
loss = criterion(output, target) # 計算 loss
loss.backward() # 反向傳播
optimizer.step()
train_loss += loss.item()*data.size(0) # 更新 loss
# enable validate mode
model.eval()
for data, target in tqdm(valid_loader):
if device:
data, target = data.cuda(), target.cuda()
output = model(data)
loss = criterion(output, target)# 計算 loss
valid_loss += loss.item()*data.size(0)# 更新 loss
# 計算平均Loss
train_loss = train_loss/len(train_loader.dataset)
valid_loss = valid_loss/len(valid_loader.dataset)
print('Training Loss: {:.6f} Validation Loss: {:.6f}'.format(train_loss, valid_loss))
# save model
if valid_loss <= valid_loss_min:
print('Validation loss decreased ({:.6f} --> {:.6f}). Saving model ...'.format(
valid_loss_min,
valid_loss))
torch.save(model.state_dict(), 'model_CNN.pth')
valid_loss_min = valid_loss

def test(loaders, model, criterion):
test_loss = 0.
correct = 0.
total = 0.
model.eval()
for batch_idx, (data, target) in enumerate(loaders):
if device:
data, target = data.cuda(), target.cuda()
output = model(data)
loss = criterion(output, target) #計算 loss
test_loss = test_loss + ((1 / (batch_idx + 1)) * (loss.data - test_loss))
# 轉成預測分類
pred = output.data.max(1, keepdim=True)[1]
# 與真實分類做比較
correct += np.sum(np.squeeze(pred.eq(target.data.view_as(pred))).cpu().numpy())
total += data.size(0)
print('Test Loss: {:.6f}'.format(test_loss))
print('Test Accuracy: %2d%% (%2d/%2d)' % (100. * correct / total, correct, total))因為本身主修NLP,用到的模型都是RNN、LSTM、GRU等等,較少接觸圖型識別這一塊,還特別去研究了CNN模型的搭建及Train的方式。
經過了這次學習使用CNN識別室內、室外這個Project,發現其實模型的搭建都是大同小異,好像Train一個圖型Model也沒有想像中那麼難了
後續也會開始嘗試 Kaggle上面其它跟圖型有關的任務,累積更多圖型識別的經驗。



