(py38) H:\git\VRT>python main_test_vrt.py --task 008_VRT_videodenoising_DAVIS --sigma 10 --folder_lq testsets/mine --tile 8 160 180 --tile_overlap 2 20 20
h:\Anaconda3\envs\py38\lib\site-packages\torch\functional.py:568: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at C:\cb\pytorch_1000000000000\work\aten\src\ATen\native\TensorShape.cpp:2228.)
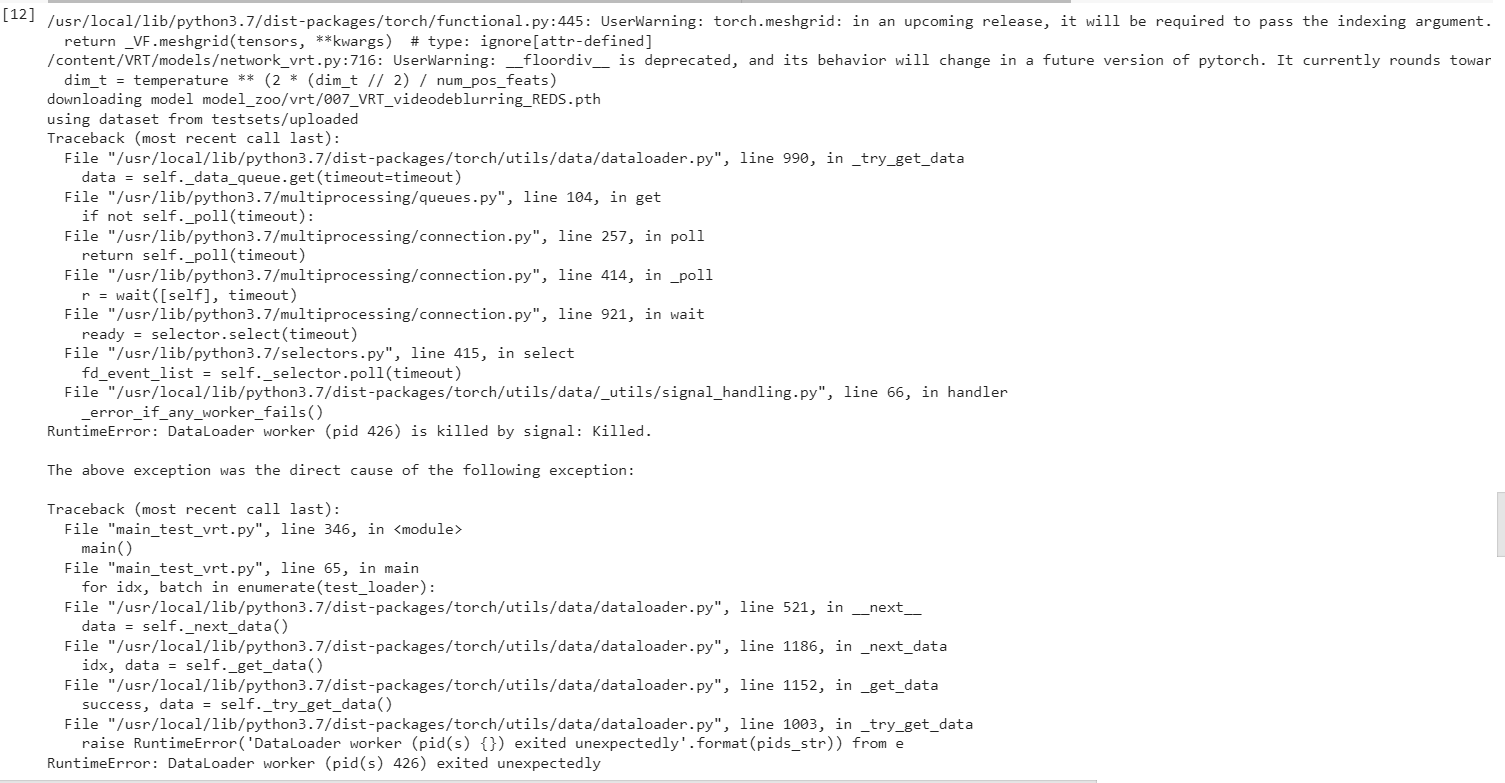
return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]
H:\git\VRT\models\network_vrt.py:716: UserWarning: __floordiv__ is deprecated, and its behavior will change in a future version of pytorch. It currently rounds toward 0 (like the 'trunc' function NOT 'floor'). This results in incorrect rounding for negative values. To keep the current behavior, use torch.div(a, b, rounding_mode='trunc'), or for actual floor division, use torch.div(a, b, rounding_mode='floor').
dim_t = temperature ** (2 * (dim_t // 2) / num_pos_feats)
loading model from ./model_zoo/vrt/model_zoo/vrt/008_VRT_videodenoising_DAVIS.pth
using dataset from testsets/mine
Traceback (most recent call last):
File "main_test_vrt.py", line 346, in <module>
main()
File "main_test_vrt.py", line 72, in main
output = test_video(lq, model, args)
File "main_test_vrt.py", line 257, in test_video
out_clip = test_clip(lq_clip, model, args)
File "main_test_vrt.py", line 308, in test_clip
out_patch = model(in_patch).detach().cpu()
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\module.py", line 1110, in _call_impl
return forward_call(*input, **kwargs)
File "H:\git\VRT\models\network_vrt.py", line 1382, in forward
flows_backward, flows_forward = self.get_flows(x)
File "H:\git\VRT\models\network_vrt.py", line 1413, in get_flows
flows_backward, flows_forward = self.get_flow_2frames(x)
File "H:\git\VRT\models\network_vrt.py", line 1436, in get_flow_2frames
flows_backward = self.spynet(x_1, x_2)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\module.py", line 1110, in _call_impl
return forward_call(*input, **kwargs)
File "H:\git\VRT\models\network_vrt.py", line 438, in forward
flow_list = self.process(ref, supp, w, h, w_floor, h_floor)
File "H:\git\VRT\models\network_vrt.py", line 412, in process
flow = self.basic_module[level](torch.cat([
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\module.py", line 1110, in _call_impl
return forward_call(*input, **kwargs)
File "H:\git\VRT\models\network_vrt.py", line 356, in forward
return self.basic_module(tensor_input)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\module.py", line 1110, in _call_impl
return forward_call(*input, **kwargs)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\container.py", line 141, in forward
input = module(input)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\module.py", line 1110, in _call_impl
return forward_call(*input, **kwargs)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\conv.py", line 447, in forward
return self._conv_forward(input, self.weight, self.bias)
File "h:\Anaconda3\envs\py38\lib\site-packages\torch\nn\modules\conv.py", line 443, in _conv_forward
return F.conv2d(input, weight, bias, self.stride,
RuntimeError: cuDNN error: CUDNN_STATUS_INTERNAL_ERROR
I suppose this is the size of the images and/or the tile settings, I don't really understand how to choose that setting as there's 3 values, I think the second and third as the height and width of the tile but what is the first one, it doesn't need the count as it can be calculated so what ?