Mitvane is Signature-based IDS (Intrusion Detection System) / IPS (Intrusion Prevension System) for ETSI-G5 based V2X communication.
- CMake 3.1 or higher
- Vanetza 0.8 (https://www.vanetza.org)
- yaml-cpp 0.7.0
- make build directory and run CMake
mkdir build && cd build
cmake .. && make- run mitvane
sudo ./bin/mitvane -s <src_interface> -d <dst_interface>Allowed options:
--help Print out available options.
-l [ --link-layer ] arg (=ethernet) Link layer type
-s [ --interface-src ] arg (=lo) Network interface for source.
-d [ --interface-dest ] arg (=lo) Network interface for destination.
--rule-file arg (=rules.yaml) Path to a rule file.
--print-rx-all Print all received messages
--print-rx-cam Print received CAMs
--print-rx-denm Print received DENMs
--print-rx-spat Print received SPATEMs
--print-rx-map Print received MAPEMs
-a [ --app-parsers ] arg (=ca den spat map)
Run applications [ca,den,spat,map]
-p [ --positioning ] arg (=static) Select positioning provider
--latitude arg (=48.766861599999999) Latitude of static position
--longitude arg (=11.432067999999999) Longitude of static position
--pos_confidence arg (=5) 95% circular confidence of static
position
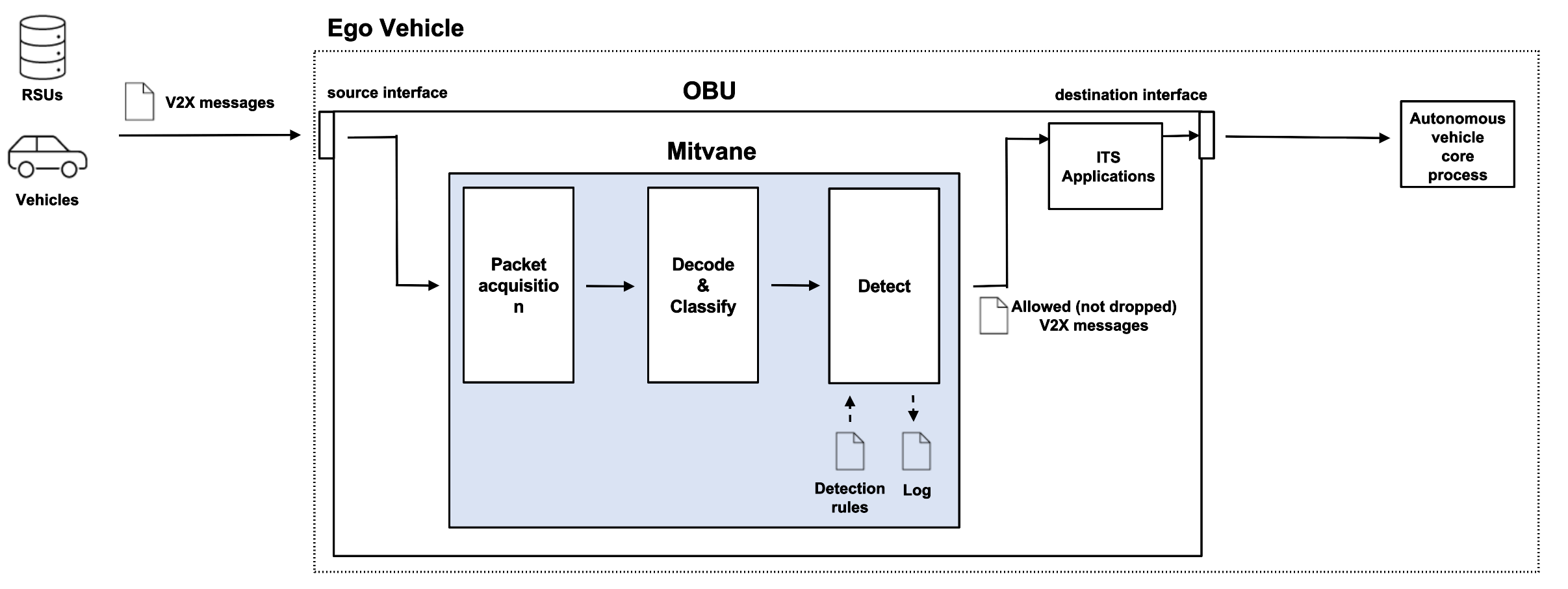
Mitvane is assumed to be deployed at OBU. Typically, Mitvane is connected with two network interfaces of the OBU. The source network interface is the one that captures packets on the IEEE 802.11p channel, while the destination interface is the one connected with ITS applications. The ITS applications transform data included in V2X messages and publish to ROS topics shared with the autonomous vehicle's core process. A simple application is available at https://github.com/camsenec/its_apps.
Detection rules can be written by YAML. Here is an example to drop packet coming from outside of a circle with a radius 200m centerd on the ego-vehicle.
- action: "drop"
protocol: "GeoNetworking"
meta:
msg: "GBC from a source far from the ego-vehicle is detected"
sid: 5
rev: 1
allowed_so_range:
shape: "circle"
distance_a: 100
distance_b: 100An example detection file is available at https://github.com/camsenec/mitvane/tree/master/example_rule.
The action determines what happens when the rule matches. The supported actions are
alert: generates an alert when a packet matches one of the patterns defined by rulesdrop: drops the packet while generating an alert
The protocol tells the IDS/IPS which protocol it concerns. The supported protocol are
GeoNetworking: Network layer, for GeoNetworking header [ETSI EN 302 636-4-1]BTP: transport layer, for BTP header [ETSI EN 302 636-5-1]CA: application layer, for CA (Cooperative Awareness) message payload [ETSI EN 302 637-2]DEN: application layer, for DEN (Decentralized Environement Notification) message payload [ETSI EN 302 637-3]RLT: application layer, for RLT (Road and Lane Topology) message payload [ETSI TS 103 097]TLM: application layer, for TLM (Traffic Light Maneuver) message payload [ETSI TS 103 097]Facility: application layer, for All V2X message payload
msg: a message generated by an alert or drop of a packet when a packet matches one of the patterns defined by rulessid: unique ID of a rulerev: the version of a rule
Detection patterns are represented by a key-value set, where the key is one of the keywords below.
| keyword | description |
|---|---|
ht |
The ht keyword is used to check for a specific type of forwarding schemes (Header Type) of GeoNetworking. The supported types of forwarding schemes are GBC, TSB and SHB. |
mhl |
The mhl keyword is used to check the maximum hop limit in TSB and GBC. If the MHL of a received packet is larger than the value specified to mhl in the detection rule file, the |
allowed_so_range |
The allowed_so_range keyword is used to check the source position vector. The keywords which consists of allowed_so_range are shape, distance_a and distance_b. With the values of these field, a range can be defined. If the source position vector does not exists in the defined range, the corresponding action is performed under the condition that the other patterns also matches. |
format: Timestamp [sid:rev] msg action {protocol}
2022-05-09 19:14:48.958789 [2:1] GBC with large max hop limit is detected. drop {GeoNetworking}
2022-05-09 19:14:48.958960 [3:1] GBC from a source far from the ego-vehicle is detected drop {GeoNetworking}
2022-05-09 19:14:48.959029 [5:1] A packet from not trusted ITS-S is detected. (Area based) drop {GeoNetworking}
2022-05-09 19:14:48.958789 [2:1] GBC with large max hop limit is detected. drop {GeoNetworking}
2022-05-09 19:14:48.958960 [3:1] GBC from a source far from the ego-vehicle is detected drop {GeoNetworking}
2022-05-09 19:14:48.959029 [5:1] A packet from not trusted ITS-S is detected. (Area based) drop {GeoNetworking}
2022-05-09 19:14:48.959029 [5:1] A packet from not trusted ITS-S is detected. (Area based) drop {GeoNetworking}
2022-05-09 19:14:48.959029 [5:1] A packet from not trusted ITS-S is detected. (Area based) drop {GeoNetworking}
2022-05-09 19:14:48.958789 [2:1] GBC with large max hop limit is detected. drop {GeoNetworking}



