Using ReRoPE, we can more effectively extend the context length of LLM without the need for fine-tuning.
- https://kexue.fm/archives/9706 (Chinese)
- https://kexue.fm/archives/9708 (Chinese)
- https://normxu.github.io/Rethinking-Rotary-Position-Embedding-2/ (English by @NormXU)
- https://normxu.github.io/Rethinking-Rotary-Position-Embedding-3/ (English by @NormXU)
Calculated the loss on llama2-13b with samples_15k.jsonl:
| Method | loss |
|---|---|
| RoPE-4k(original llama2-13b) | 1.4967 |
| RoPE-8k(original llama2-13b) | 8.8615 |
| NTK-RoPE-4k(not dynamic) | 1.6081 |
| NTK-RoPE-8k(not dynamic) | 1.5417 |
| NTK-RoPE-16k(not dynamic) | 1.5163 |
| ReRoPE-w1024-4k | 1.4996 |
| ReRoPE-w1024-8k | 1.4267 |
| ReRoPE-w1024-16k | 1.4001 |
ReRoPE's performance at training length (4k) has hardly decreased, and it possesses the ideal property of "longer context, lower loss".
Dependency: transformers 4.31.0
Run python test.py to test chatting or run python eval_loss.py to calculate loss with llama2.
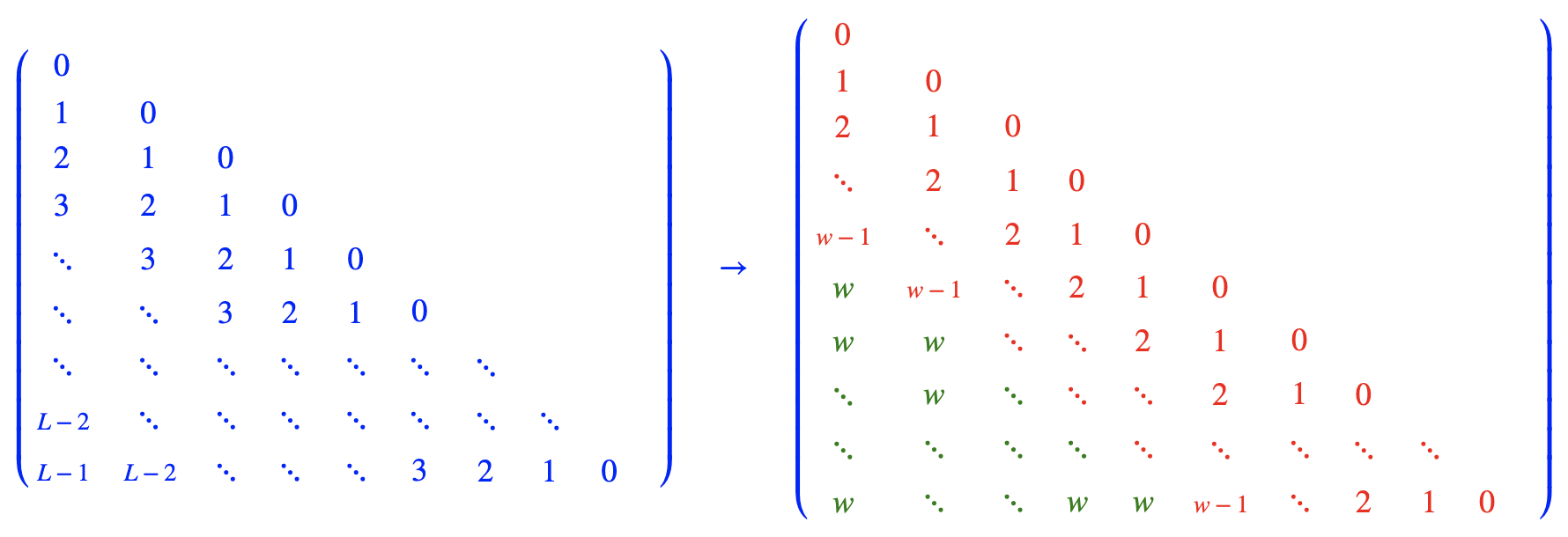
From here and here, we can see what modifications ReRoPE/Leaky ReRoPE has made compared to the original llama implementation.
Triton Implementation of ReRoPE: https://gist.github.com/chu-tianxiang/4307937fd94b49c75b61a6967716bae9
@misc{rerope2023,
title={Rectified Rotary Position Embeddings},
author={Jianlin Su},
year={2023},
howpublished={\url{https://github.com/bojone/rerope}},
}
QQ discussion group: 67729435, for WeChat group, please add the robot WeChat ID spaces_ac_cn
























































")




































 Zhang")












")





