Authors: Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M. M. Montiel, Juan D. Tardos.
The Changelog describes the features of each version.
ORB-SLAM3 is the first real-time SLAM library able to perform Visual, Visual-Inertial and Multi-Map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. In all sensor configurations, ORB-SLAM3 is as robust as the best systems available in the literature, and significantly more accurate.
We provide examples to run ORB-SLAM3 in the EuRoC dataset using stereo or monocular, with or without IMU, and in the TUM-VI dataset using fisheye stereo or monocular, with or without IMU. Videos of some example executions can be found at ORB-SLAM3 channel.
This software is based on ORB-SLAM2 developed by Raul Mur-Artal, Juan D. Tardos, J. M. M. Montiel and Dorian Galvez-Lopez (DBoW2).
[ORB-SLAM3] Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M. M. Montiel and Juan D. Tardós, ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM, IEEE Transactions on Robotics 37(6):1874-1890, Dec. 2021. PDF.
[IMU-Initialization] Carlos Campos, J. M. M. Montiel and Juan D. Tardós, Inertial-Only Optimization for Visual-Inertial Initialization, ICRA 2020. PDF
[ORBSLAM-Atlas] Richard Elvira, J. M. M. Montiel and Juan D. Tardós, ORBSLAM-Atlas: a robust and accurate multi-map system, IROS 2019. PDF.
[ORBSLAM-VI] Raúl Mur-Artal, and Juan D. Tardós, Visual-inertial monocular SLAM with map reuse, IEEE Robotics and Automation Letters, vol. 2 no. 2, pp. 796-803, 2017. PDF.
[Stereo and RGB-D] Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1255-1262, 2017. PDF.
[Monocular] Raúl Mur-Artal, José M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
[DBoW2 Place Recognition] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012. PDF
ORB-SLAM3 is released under GPLv3 license. For a list of all code/library dependencies (and associated licenses), please see Dependencies.md.
For a closed-source version of ORB-SLAM3 for commercial purposes, please contact the authors: orbslam (at) unizar (dot) es.
If you use ORB-SLAM3 in an academic work, please cite:
@article{ORBSLAM3_TRO,
title={{ORB-SLAM3}: An Accurate Open-Source Library for Visual, Visual-Inertial
and Multi-Map {SLAM}},
author={Campos, Carlos AND Elvira, Richard AND G\´omez, Juan J. AND Montiel,
Jos\'e M. M. AND Tard\'os, Juan D.},
journal={IEEE Transactions on Robotics},
volume={37},
number={6},
pages={1874-1890},
year={2021}
}
The above official repository list installation steps for the package. However, the package could not be build with the steps given in the repository. The following repo consist of all errors encountered while building the package along with ways to debug those errors.
We use the new thread and chrono functionalities of C++11.
We use Pangolin for visualization and user interface. Dowload and install instructions can be found at: https://github.com/stevenlovegrove/Pangolin.
We use OpenCV to manipulate images and features. Dowload and install instructions can be found at: http://opencv.org. Required at leat 3.0. Tested with OpenCV 3.2.0
Required by g2o (see below). Download and install instructions can be found at: http://eigen.tuxfamily.org. Required at least 3.1.Tested with version 3.3.50.
We use modified versions of the DBoW2 library to perform place recognition and g2o library to perform non-linear optimizations. Both modified libraries (which are BSD) are included in the Thirdparty folder.
Required to calculate the alignment of the trajectory with the ground truth. Required Numpy module.
- (deb)
sudo apt install libpython2.7-dev
We provide some examples to process input of a monocular, monocular-inertial, stereo, stereo-inertial or RGB-D camera using ROS. Building these examples is optional. ** These have been tested with ROS Melodic under Ubuntu 18.04.**
To confirm your C++ version, simply use the following command in the terminal:
g++ --versionPangolin is a lightweight library for managing OpenGL display and interaction.
Follow these steps to install it:
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .
sudo make installInstall missing dependencies if encountered:
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocolsTest the installation using the example:
cd build/examples/HelloPangolin
./HelloPangolinOpenCV is a popular computer vision library. Install it using the following steps:
1)Navigate to the opencv folder and open a terminal
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
Eigen3 is a linear algebra library. Install it as follows:
After downloading the compressed file, extract it to your workspace. Navigate to the eigen-3.3.5 folder and open a terminal:
mkdir build
cd build
cmake ..
sudo make installVerify the installation:
locate eigen3The source code for DBoW2 and g2o is already present in the Thirdparty folder.
Python 2.7 is required to calculate the alignment of the trajectory with the ground truth. Make sure you have the Numpy module installed:
sudo apt install libpython2.7-devClone the repository:
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git ORB_SLAM3
Commit Hash: https://github.com/UZ-SLAMLab/ORB_SLAM3/commit/4452a3c4ab75b1cde34e5505a36ec3f9edcdc4c4 Commit Date: Feb 10, 2022
The build.sh script compiles five different binaries. Building those binaries individually helps debug errors efficiently.
The following instructions will guide you through the process of compiling the ORB SLAM3 package. This guide assumes that you are using a Linux-based system and are comfortable using the terminal.
-
Open a terminal and navigate to the ORB SLAM3 directory:
cd ORB_SLAM3 -
Compile Thirdparty/DBoW2 library:
cd Thirdparty/DBoW2 mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j -
Compile g2o library:
cd ../../g2o mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j -
Compile Sophus library:
cd ../../Sophus mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j
-
Navigate back to the main ORB SLAM3 directory:
cd ../../../ -
Extract the Vocabulary:
cd Vocabulary tar -xf ORBvoc.txt.tar.gz cd ..
- Compile the ORB SLAM3 library:
mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j4
If you encounter issues while compiling the ORB SLAM3 project, you might come across the following errors along with their respective solutions:
Solution: You can resolve this issue by installing the required Boost library. Open a terminal and run the following command:
sudo apt install libboost-filesystem-devSolution: To fix this error, you need to install the OpenSSL development package. Run the following command in your terminal:
sudo apt-get install libssl-devSolution: You can resolve this issue by installing the complete Boost library. Execute the following command in your terminal:
sudo apt install libboost-all-devSolution:
This error can be fixed by modifying the CMakeLists.txt file under the ORB_SLAM3 directory. Locate the line find_package(OpenCV 4.4) and replace it with:
find_package(OpenCV 3.2.0)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()Solution: You need to manually download the ippicv_linux_20151201.tgz package from this link. After downloading, follow these steps:
- Navigate to your OpenCV source directory.
- Create a 'build' directory.
- Enter the 'build' directory and run CMake to generate the build files:
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
- Build and install OpenCV:
sudo make sudo make install
- Update your shared library configuration:
Add the line
sudo gedit /etc/ld.so.conf.d/opencv.conf
/usr/local/libat the end of the file. - Update the dynamic linker:
sudo ldconfig
- Add OpenCV to your bash environment variables:
Add these lines at the end of the file:
sudo gedit /etc/bash.bashrc
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig export PKG_CONFIG_PATH source /etc/bash.bashrc sudo updatedb
Solution:
Ensure that you update your ~/.bashrc file with the correct environment variable path for ROS and adjust the directory changes as follows:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/path/to/ORB_SLAM3/Examples_old/ROS
cd /path/to/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make -jSolution:
Check your ROS PACKAGE PATH in your ~/.bashrc file and make sure it's correctly set:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/path/to/ORB_SLAM3/Examples_old/ROSSolution: Install the required Boost library by executing the following command:
sudo apt install libboost-filesystem-devSolution:
In the CMakeLists.txt file located in ORB_SLAM3/Examples_old/ROS/ORB_SLAM3, add ${PROJECT_SOURCE_DIR}/../../../Thirdparty/Sophus to the include_directories section.
Solution: Modify the line to handle the transformation from Sophus to OpenCV matrices:
cv::Mat Tcw;
Sophus::SE3f Tcw_SE3f = mpSLAM->TrackMonocular(...);
Eigen::Matrix4f Tcw_Matrix = Tcw_SE3f.matrix();
cv::eigen2cv(Tcw_Matrix, Tcw);Solution: Replace the line with:
cv::Mat WorldPos;
cv::eigen2cv(pMP->GetWorldPos(), WorldPos);
vPoints.push_back(WorldPos);Also, replace instances of:
cv::Mat Xw = pMP->GetWorldPos();with:
cv::Mat Xw;
cv::eigen2cv(pMP->GetWorldPos(), Xw);For further assistance and community discussions, refer to the ORB SLAM3 GitHub repository. Make sure to follow the instructions carefully to successfully compile and run the project.
To run ORB SLAM 3 on ROS-Melodic, follow these steps. Open three terminals and execute the commands as shown:
roscorerosrun ORB_SLAM3 Stereo Vocabulary/ORBvoc.txt Examples_old/Stereo/EuRoC.yaml truerosbag play --pause V1_03_difficult.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_rawIn Terminal 1, the roscore command launches the ROS core, which is required for communication between ROS nodes.
In Terminal 2, the rosrun command executes ORB SLAM 3 in stereo mode. Make sure to provide the correct paths to the ORB vocabulary file (Vocabulary/ORBvoc.txt) and the configuration file (Examples_old/Stereo/EuRoC.yaml). The true parameter enables visualization.
In Terminal 3, the rosbag play command is used to play a ROS bag file containing camera data. The --pause flag starts the bag in a paused state, allowing you to synchronize it properly. The command uses remapping to connect the bag's camera topics (/cam0/image_raw and /cam1/image_raw) to the ORB SLAM 3 expected topics (/camera/left/image_raw and /camera/right/image_raw).
With these steps, you can effectively run ORB SLAM 3 on ROS-Melodic using stereo camera input. Remember to replace file paths and topic names as needed for your specific setup.
 This figure illustrates the ROS graph visualization using RQT. It showcases the communication flow between different ROS nodes in the system.
This figure illustrates the ROS graph visualization using RQT. It showcases the communication flow between different ROS nodes in the system.
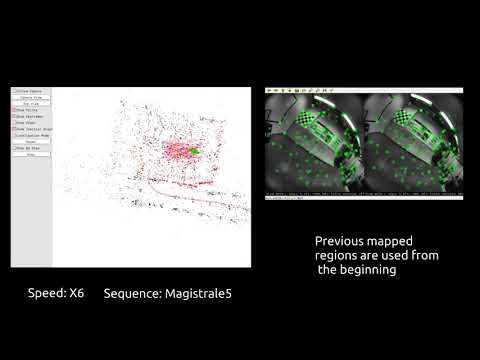
 The image above displays the output of ORB SLAM 3 on the Euroc dataset V1-03-Difficult. The system tracks and maps the environment using visual odometry techniques.
The image above displays the output of ORB SLAM 3 on the Euroc dataset V1-03-Difficult. The system tracks and maps the environment using visual odometry techniques.
 This image showcases the output of ORB SLAM 3 with a buffer applied to the Euroc dataset V1-03-Difficult. The buffer enhances tracking performance and overall SLAM accuracy.
This image showcases the output of ORB SLAM 3 with a buffer applied to the Euroc dataset V1-03-Difficult. The buffer enhances tracking performance and overall SLAM accuracy.
 The graph above depicts the tracking metric plot obtained from running ORB SLAM 3 with a buffer on the Euroc dataset V1-03-Difficult. It provides insights into tracking quality throughout the SLAM process.
The graph above depicts the tracking metric plot obtained from running ORB SLAM 3 with a buffer on the Euroc dataset V1-03-Difficult. It provides insights into tracking quality throughout the SLAM process.
 This figure represents the step size plot, revealing the variations in camera movement step sizes during the SLAM process on the Euroc dataset V1-03-Difficult.
This figure represents the step size plot, revealing the variations in camera movement step sizes during the SLAM process on the Euroc dataset V1-03-Difficult.
 The buffer length plot showcases the changes in buffer size over time during the SLAM process on the Euroc dataset V1-03-Difficult.
The buffer length plot showcases the changes in buffer size over time during the SLAM process on the Euroc dataset V1-03-Difficult.
 The velocity plot illustrates the changes in camera velocity during the SLAM process on the Euroc dataset V1-03-Difficult.
The velocity plot illustrates the changes in camera velocity during the SLAM process on the Euroc dataset V1-03-Difficult.
For a comprehensive analysis of ORB SLAM 3 outputs and performance, refer to the provided graphs and visualizations. These visual insights offer valuable information about the system's behavior and efficiency.
GitHub Repository: https://github.com/Kuzuri15/ORB_SLAM3_Project