Comments (14)
 raghavendersahdev
commented on September 17, 2024
3
raghavendersahdev
commented on September 17, 2024
3
Hi @trent-weiss @ipa-mjp @Souphis . I had the exact same issue but I was able to build and run STOMP successfully after doing the following. I had to remove 3 packages. You need to remove the following folders / packages from industrial_move_it:
- industrial_collision_detection: Recently everything that was in industrial_collision_detection package was merged into moveit (reason for multiple definitions) adding the ability to get detailed distance information. You will need to remove this package from the repository and try and build again. It may specifically check for the collision detection library name "IndustrialFCL" somewhere in the code which can now be removed because moveit supports the necessary capability. credits to @Levi-Armstrong for pointing me to this duplication. Also remove industrial_collision_detection, constraint_ik, industrial_moveit_benchmarking packages from any CMakeLists.txt where it explicityly finds these packages.
- constraint_ik: package / folder as it had includes from the industrial_collision_detection package like this, this, this, etc
- industrial_moveit_benchmarking: since this package has dependencies on the header files/classes obtained from the constraint_ik package, I removed this too.
After doing the above steps, a catkin build or catkin_make should be able to fix and compile it.
from industrial_moveit.
 mjpatell
commented on September 17, 2024
2
mjpatell
commented on September 17, 2024
2
Hello @raghavendersahdev ,
Thank you so much for your help. Now after removing all 3 packages, I am able to compile and build.
from industrial_moveit.
mjpatell
commented on September 17, 2024
Hello,
I am getting same problem. Did you solved your error?
from industrial_moveit.
 gbartyzel
commented on September 17, 2024
gbartyzel
commented on September 17, 2024
Not yet. However I've tried compile it on ROS-I Industrial Training VM and to my surprise, everything works well there. Maybe some dependencies are missing or sth.
from industrial_moveit.
mjpatell
commented on September 17, 2024
Hello,
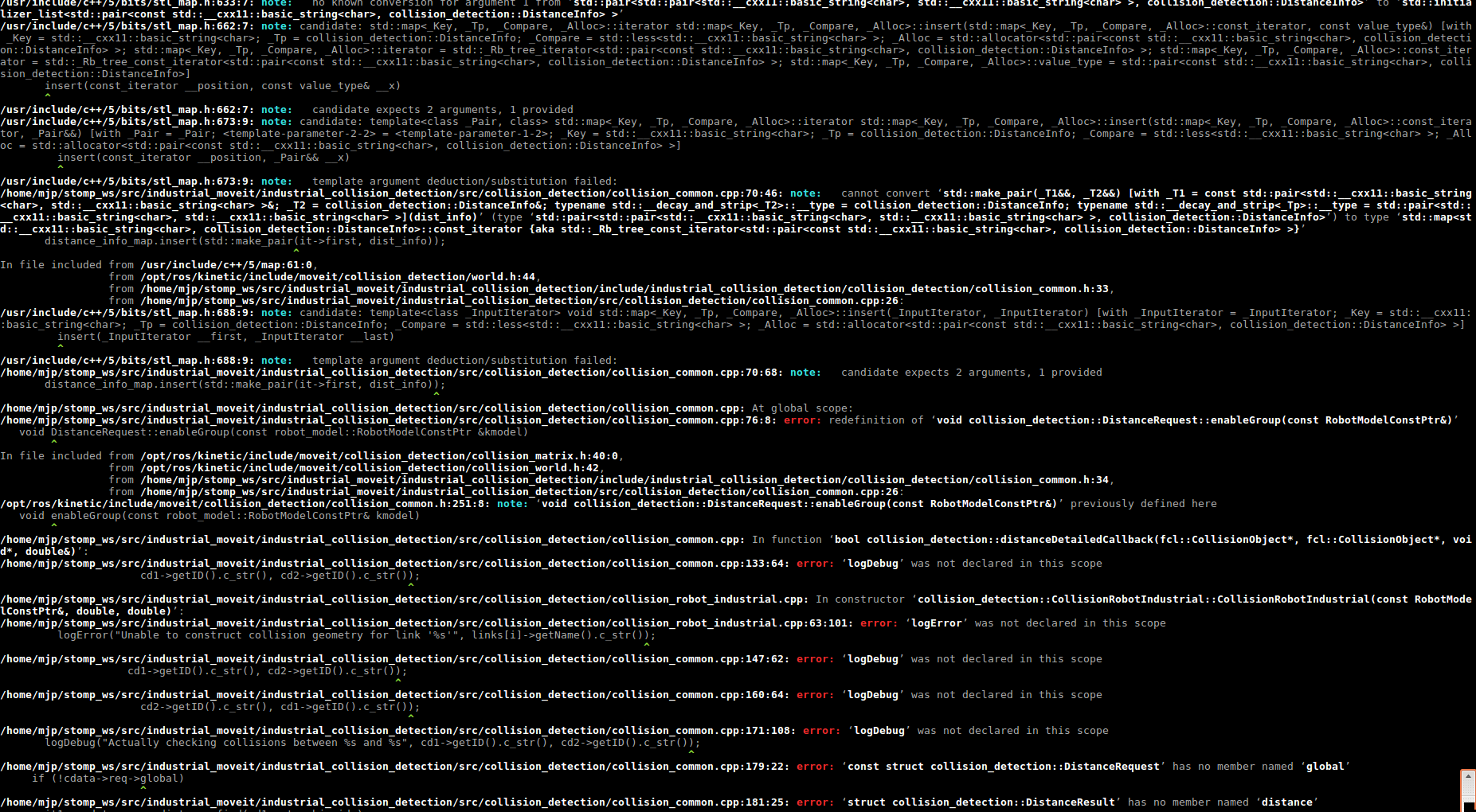
Thank you so much. After installing all required dependency I am getting below of errors along with same error you mentioned.
from industrial_moveit.
gbartyzel
commented on September 17, 2024
I got same errors on my PC. I compared ros packages installed on ROS-I VM and my Ubuntu, and there is not difference besides some additionals.
from industrial_moveit.
mjpatell
commented on September 17, 2024
Hello,
I don't have any idea what am doing wrong. Do you have any idea to resolve this error?
Thank you
from industrial_moveit.
 trent-weiss
commented on September 17, 2024
trent-weiss
commented on September 17, 2024
I am getting an identical error.
It appears the issue is related to redeclaring a struct collision_detection::DistanceRequest that already exists in MoveIt.
Not sure how to fix it.
from industrial_moveit.
mjpatell
commented on September 17, 2024
Hello @raghavendersahdev ,
Thank you for your information. I try to follow step as you mention. But I have other errors that's obvious. The reason is
- constraint_ik: include/constrained_ik/constraints /avoid_obstacles.h where they access function of industrial_collision_detection class while that functions/structs are not part of MoveIt! at this moment. I don't think so I can remove whole industrial_collision_detection repo. https://github.com/ros-industrial/industrial_moveit/blob/kinetic-devel/constrained_ik/include/constrained_ik/constraints/avoid_obstacles.h#L135 (I just mentioned one error might be possible form other packages and/or files)

-
If you already did this and compile and/or build fine. Than can you give me info/access of your repo? So that I can try in my pc. Did you create PR after solving this error?
-
If any one solve this problem please suggest me.
Thank you.
from industrial_moveit.
raghavendersahdev
commented on September 17, 2024
Hi @ipa-mjp as per my previous comment, you need to remove 3 all packages not just the industrial_collision_detection package. The 3 packages/folder you need to remove are:
- industrial_collision_detection
- constraint_ik
- industrial_moveit_benchmarking
After removing these 3 packages completely, your code should successfully build....If there is a dependency of any of these packages listed in any CMakeLists.txt file, please remove that too.
Hope this helps.
from industrial_moveit.
 jrgnicho
commented on September 17, 2024
jrgnicho
commented on September 17, 2024
@ipa-mjp by removing you mean deleting from the package.xml list or deleting the actual packages themselves?
from industrial_moveit.
raghavendersahdev
commented on September 17, 2024
Hi @jrgnicho , both worked for me:
- completely removing / deleteing the 3 packages also works, or Alternatively
- simply removing from package.xml and using CATKIN_IGNORE for the three packages also worked
I removed / deleted industrial moveit and did catkin_ignore for the 2 packages (constriaint_ik and industrial_moveit_benchmarking). I did this as in my commit
from industrial_moveit.
mjpatell
commented on September 17, 2024
Hi @jrgnicho,
Even both worked for me.
from industrial_moveit.
 Ridhwanluthra
commented on September 17, 2024
Ridhwanluthra
commented on September 17, 2024
@raghavendersahdev if those packages are removed it will not be able to use those functionalities.
@ipa-hsd mentioned that this commit in moveit leads to the error.
Is it that the functionality from here was shifted to moveit? coz they seem similar.
from industrial_moveit.
Related Issues (20)
- Building error with Melodic HOT 2
- melodic code no longger build HOT 3
- Constrained IK (CLIK) for dual arms HOT 4
- STOMP fails to find valid solution after seeding with a valid trajectory HOT 6
- Getting started with constraint_ik HOT 3
- Documentation on how to provide an initial trajectory ? HOT 4
- Using OMPL and STOMP at the same time HOT 14
- Setting end effector constraints when using STOMP HOT 5
- MoveItCommanderException: Error setting joint target. Is IK running? HOT 1
- "Jerky" motions while using kuka_rsi_hw_interface for a KUKA KR240 L210 MED HOT 1
- STOMP can't plan path avoid obstacle if using mimic joints HOT 1
- Error messages from constrained ik unit test
- STOMP planner (Moveit/Rviz) no planning library loaded HOT 7
- Migrate STOMP related issues (and PRs?) to stomp_ros HOT 3
- Description typo
- License is `TODO` for `industrial_moveit_test_support` HOT 1
- Error STOMP demo.launch in ROS Melodic
- Unstable planning when use Stomp
- fatal error: Eigen/Geometry: No such file or directory #include <Eigen/Geometry> HOT 1
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from industrial_moveit.