Comments (19)
 liwenz
commented on July 22, 2024
liwenz
commented on July 22, 2024
3 command total
No. 1:
roslaunch spot_micro_motion_cmd motion_cmd.launch run_standalone:=true
started roslaunch server http://leon-desktop:46693/
SUMMARY
PARAMETERS
- /rosdistro: melodic
- /rosversion: 1.14.10
- /spot_micro_motion_cmd_node/LB_1/center: 306
- /spot_micro_motion_cmd_node/LB_1/center_angle_deg: -0.4
- /spot_micro_motion_cmd_node/LB_1/direction: -1
- /spot_micro_motion_cmd_node/LB_1/num: 9
- /spot_micro_motion_cmd_node/LB_1/range: 374
- /spot_micro_motion_cmd_node/LB_2/center: 306
- /spot_micro_motion_cmd_node/LB_2/center_angle_deg: 38.7
- /spot_micro_motion_cmd_node/LB_2/direction: 1
- /spot_micro_motion_cmd_node/LB_2/num: 8
- /spot_micro_motion_cmd_node/LB_2/range: 392
- /spot_micro_motion_cmd_node/LB_3/center: 306
- /spot_micro_motion_cmd_node/LB_3/center_angle_deg: -73.9
- /spot_micro_motion_cmd_node/LB_3/direction: 1
- /spot_micro_motion_cmd_node/LB_3/num: 7
- /spot_micro_motion_cmd_node/LB_3/range: 390
- /spot_micro_motion_cmd_node/LF_1/center: 306
- /spot_micro_motion_cmd_node/LF_1/center_angle_deg: -7.6
- /spot_micro_motion_cmd_node/LF_1/direction: 1
- /spot_micro_motion_cmd_node/LF_1/num: 12
- /spot_micro_motion_cmd_node/LF_1/range: 389
- /spot_micro_motion_cmd_node/LF_2/center: 306
- /spot_micro_motion_cmd_node/LF_2/center_angle_deg: 38.6
- /spot_micro_motion_cmd_node/LF_2/direction: 1
- /spot_micro_motion_cmd_node/LF_2/num: 11
- /spot_micro_motion_cmd_node/LF_2/range: 397
- /spot_micro_motion_cmd_node/LF_3/center: 306
- /spot_micro_motion_cmd_node/LF_3/center_angle_deg: -82.8
- /spot_micro_motion_cmd_node/LF_3/direction: 1
- /spot_micro_motion_cmd_node/LF_3/num: 10
- /spot_micro_motion_cmd_node/LF_3/range: 387
- /spot_micro_motion_cmd_node/RB_1/center: 306
- /spot_micro_motion_cmd_node/RB_1/center_angle_deg: -4.4
- /spot_micro_motion_cmd_node/RB_1/direction: 1
- /spot_micro_motion_cmd_node/RB_1/num: 6
- /spot_micro_motion_cmd_node/RB_1/range: 411
- /spot_micro_motion_cmd_node/RB_2/center: 306
- /spot_micro_motion_cmd_node/RB_2/center_angle_deg: -35.4
- /spot_micro_motion_cmd_node/RB_2/direction: 1
- /spot_micro_motion_cmd_node/RB_2/num: 5
- /spot_micro_motion_cmd_node/RB_2/range: 396
- /spot_micro_motion_cmd_node/RB_3/center: 306
- /spot_micro_motion_cmd_node/RB_3/center_angle_deg: 85.8
- /spot_micro_motion_cmd_node/RB_3/direction: 1
- /spot_micro_motion_cmd_node/RB_3/num: 4
- /spot_micro_motion_cmd_node/RB_3/range: 396
- /spot_micro_motion_cmd_node/RF_1/center: 306
- /spot_micro_motion_cmd_node/RF_1/center_angle_deg: -5.4
- /spot_micro_motion_cmd_node/RF_1/direction: -1
- /spot_micro_motion_cmd_node/RF_1/num: 3
- /spot_micro_motion_cmd_node/RF_1/range: 396
- /spot_micro_motion_cmd_node/RF_2/center: 306
- /spot_micro_motion_cmd_node/RF_2/center_angle_deg: -27.6
- /spot_micro_motion_cmd_node/RF_2/direction: 1
- /spot_micro_motion_cmd_node/RF_2/num: 2
- /spot_micro_motion_cmd_node/RF_2/range: 389
- /spot_micro_motion_cmd_node/RF_3/center: 306
- /spot_micro_motion_cmd_node/RF_3/center_angle_deg: 88.2
- /spot_micro_motion_cmd_node/RF_3/direction: 1
- /spot_micro_motion_cmd_node/RF_3/num: 1
- /spot_micro_motion_cmd_node/RF_3/range: 372
- /spot_micro_motion_cmd_node/alpha: 0.5
- /spot_micro_motion_cmd_node/back_body_balance_shift: 0.005
- /spot_micro_motion_cmd_node/beta: 0.5
- /spot_micro_motion_cmd_node/body_length: 0.186
- /spot_micro_motion_cmd_node/body_shift_phases: [1, 2, 3, 4, 5, 6...
- /spot_micro_motion_cmd_node/body_width: 0.078
- /spot_micro_motion_cmd_node/debug_mode: False
- /spot_micro_motion_cmd_node/default_stand_height: 0.155
- /spot_micro_motion_cmd_node/dt: 0.02
- /spot_micro_motion_cmd_node/foot_height_time_constant: 0.02
- /spot_micro_motion_cmd_node/fwd_body_balance_shift: 0.035
- /spot_micro_motion_cmd_node/hip_link_length: 0.055
- /spot_micro_motion_cmd_node/lb_contact_phases: [1, 1, 1, 1, 1, 0...
- /spot_micro_motion_cmd_node/lf_contact_phases: [1, 1, 1, 1, 1, 1...
- /spot_micro_motion_cmd_node/lidar_x_pos: 0.045
- /spot_micro_motion_cmd_node/lidar_y_pos: 0.0
- /spot_micro_motion_cmd_node/lidar_yaw_angle: 180
- /spot_micro_motion_cmd_node/lidar_z_pos: 0.085
- /spot_micro_motion_cmd_node/lie_down_foot_x_offset: 0.065
- /spot_micro_motion_cmd_node/lie_down_height: 0.083
- /spot_micro_motion_cmd_node/lower_leg_link_length: 0.13
- /spot_micro_motion_cmd_node/max_fwd_velocity: 0.4
- /spot_micro_motion_cmd_node/max_side_velocity: 0.4
- /spot_micro_motion_cmd_node/max_yaw_rate: 0.35
- /spot_micro_motion_cmd_node/num_phases: 8
- /spot_micro_motion_cmd_node/num_servos: 12
- /spot_micro_motion_cmd_node/overlap_time: 0.0
- /spot_micro_motion_cmd_node/plot_mode: False
- /spot_micro_motion_cmd_node/publish_odom: True
- /spot_micro_motion_cmd_node/rb_contact_phases: [1, 0, 1, 1, 1, 1...
- /spot_micro_motion_cmd_node/rf_contact_phases: [1, 1, 1, 0, 1, 1...
- /spot_micro_motion_cmd_node/run_standalone: True
- /spot_micro_motion_cmd_node/servo_max_angle_deg: 82.5
- /spot_micro_motion_cmd_node/side_body_balance_shift: 0.015
- /spot_micro_motion_cmd_node/stand_back_x_offset: -0.0
- /spot_micro_motion_cmd_node/stand_front_x_offset: 0.015
- /spot_micro_motion_cmd_node/standalone_mode: False
- /spot_micro_motion_cmd_node/swing_time: 0.36
- /spot_micro_motion_cmd_node/transit_angle_rl: 0.35
- /spot_micro_motion_cmd_node/transit_rl: 0.06
- /spot_micro_motion_cmd_node/transit_tau: 0.3
- /spot_micro_motion_cmd_node/upper_leg_link_length: 0.1075
- /spot_micro_motion_cmd_node/z_clearance: 0.05
NODES
/
spot_micro_motion_cmd_node (spot_micro_motion_cmd/spot_micro_motion_cmd_node)
auto-starting new master
process[master]: started with pid [3537]
ROS_MASTER_URI=http://localhost:11311
No. 2
On a computer:(ubuntu16 vm)
roslaunch spot_micro_keyboard_command keyboard_command.launch run_rviz:=true
dog display,but I don't know how to control to move, only know control interface.
stand walk idle
in walk
qweasd seem no function
No. 3
roslaunch i2cpwm_board i2cpwm_node.launch
on pi 3B
from : http://bradanlane.gitlab.io/ros-i2cpwmboard/
PARAMETERS
- /rosdistro: melodic
- /rosversion: 1.14.10
NODES
/
i2cpwm_board_node (i2cpwm_board/i2cpwm_board)
auto-starting new master
process[master]: started with pid [3584]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to fffe69ea-941c-11eb-b0be-b827eb8897a3
process[rosout-1]: started with pid [3595]
started core service [/rosout]
process[i2cpwm_board_node-2]: started with pid [3598]
sudo: no tty present and no askpass program specified
[i2cpwm_board_node-2] process has died [pid 3598, exit code 1, cmd sudo /home/leon/dog/devel/lib/i2cpwm_board/i2cpwm_board __name:=i2cpwm_board_node __log:=/home/leon/.ros/log/fffe69ea-941c-11eb-b0be-b827eb8897a3/i2cpwm_board_node-2.log].
log file: /home/leon/.ros/log/fffe69ea-941c-11eb-b0be-b827eb8897a3/i2cpwm_board_node-2*.log

from spotmicro.
 mike4192
commented on July 22, 2024
mike4192
commented on July 22, 2024
If spot_micro_motion_cmd in standalone mode, you do not need to run the i2cpwm_board node.
I think you need to verify you can exchange communication between your ubuntu virtual machine and the raspberry pi.
They must be connected on the same network, or to eachother. You may need to modify network settings in the virtual machine software to get communication with the raspberry pi.
First verify you can ping the ip address of the raspberry pi from your ubuntu virtual machine. Find what ip address the raspbery pi has on it's wireless network interface through ifconfig.
On the virtual machine try pinging that ip address, example: ping 192.168.1.xx where xx is the last part of the address the pi has.
On your virtual machine you need to make sure you set some environment variables so nodes know the ROS master is on the pi. You may need to set ROS_MASTER_URI and ROS_IP. I have the following in my ~/.bashrc file. You'd have to replace http://ubunturospi.local with the ip address of your raspberry pi. You would also need to set ROS_IP to your virtual machine's ip address.
export ROS_MASTER_URI=http://ubunturospi.local:11311 # Set IP of ros master, raspberry pi in this case
export ROS_IP=$(hostname -I | cut -f1 -d' ') # set own ros ip environment variable
alias rosinit="source /home/mike/catkin_ws/devel/setup.bash && export ROS_WORKSPACE=~/catkin_ws"
Before trying to run this software, I would make sure you can successfully run a ROS tutorial example, where one node is on the Rapsberry pi, and one node is on the virtual machine. For example, the simple publisher and subscriber: http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29
The following video may help guide you as a basic ros tutorial for running stuff on a raspberr pu: https://www.youtube.com/watch?v=iLiI_IRedhI
from spotmicro.
liwenz
commented on July 22, 2024
Thanks for your reply!
My pc(win10) and pi are the same wifi network and I use ssh to control pi on win10. But my vm (on win10) has some problem.
Maybe I played the docker then vm ubuntu16 lost local network. At first,VM ubuntu 16 could not work then I close Hyper-V and vm rework.
I don't know how to fix it.
The robot should work on only one pi . Maybe more terminal. Then remote node control mode.
I bought 8g pi 4b on March 13, but Amazon delay to next week.
At first, i2c servo should work. The servo rotate on my zynq 7010 system(Xilinx fpga) by direct pwm and i2c two way.
Or it should be simulate on a ROS and I understand Kinematics.
https://spotmicroai.readthedocs.io/en/latest/simulation/ seems a good site.
from spotmicro.
 AlekseyErmolaev
commented on July 22, 2024
AlekseyErmolaev
commented on July 22, 2024
Hey! I didn't create a new topic. I hope you can help me.
I have a small problem and I cannot figure out where to look for a solution.
I have RPi4(ubiquityrobot), ubuntu 16.04 laptop, terminal with ssh. catkin_make is 100% assembled.
I use roslaunch spot_micro_keyboard_command keyboard_command.launch run_rviz:=true on laptop and roslaunch spot_micro_motion_cmd motion_cmd.launch run_standalone:=true on RPi.
After the command "stand" appears:
[ WARN] [1617730100.302570705]: Joint LF_2, Angle: 37.42
[ WARN] [1617730100.302659575]: Proportional Command below -1.0 was computed, clipped to -1.0
[ WARN] [1617730100.302758926]: Joint LF_3, Angle: -128.00
[ WARN] [1617730100.302853740]: Proportional Command above +1.0 was computed, clipped to 1.0
[ WARN] [1617730100.302923776]: Joint RB_3, Angle: 128.14
[ WARN] [1617730100.303019090]: Proportional Command above +1.0 was computed, clipped to 1.0
[ WARN] [1617730100.303093126]: Joint RF_3, Angle: 128.00
[ WARN] [1617730100.322427290]: Proportional Command below -1.0 was computed, clipped to -1.0
[ WARN] [1617730100.322514511]: Joint LB_3, Angle: -128.15
[ WARN] [1617730100.322585288]: Proportional Command above +1.0 was computed, clipped to 1.0
Angle values change. Joint numbers do not change.
In rviz, the image of the legs begins to twitch.
I really hope for your help!
from spotmicro.
mike4192
commented on July 22, 2024
Those are the right two commands that should be able to start up the software. Did you modify the configuration at all? This warning means a joint angle beyond the intended travel range was computed for some reason.
If the legs are twitching there may inadvertently be another node running trying to command the leg servos. Make sure your not running two instances of anything.
You can try running the motion command node on your laptop instead of the pi to see if you get any different result.
Lastly, it could be some artifact of running on a rpi4 versus a rpi3. I don't have one to test so I am unsure what impact it may have, though I think others have gotten it working on a rpi4.
@liwenz Sorry, I don't really know how to help you anymore.
from spotmicro.
AlekseyErmolaev
commented on July 22, 2024
Here is a screenshot of my table

Maybe you can see what's wrong
from spotmicro.
liwenz
commented on July 22, 2024
I reinstall ubuntu mate 16(pi) and vm ubuntu 16 (another pc)
pi ip: 192.168.2.80
vm ip:192.168.2.85
but I don't know the remote publisher,
What should start in pi, and what should do on vm?
roslaunch servo_move_keyboard keyboard_move.launch
it seems to work well.
No error, and I know choose the servo number, and x,y,z show the angles.
Should the servo run to min,center,max, or only a config?
My servo did not run
from spotmicro.
liwenz
commented on July 22, 2024
roslaunch servo_move_keyboard keyboard_move.launch
it seems run ok as follow, but servo did not move, then logic analyzer check it. There is no wave.
From doc, it should control the servo move and there should be waves.
Which servo to control? Enter a number 1 through 12: 1
Enter command, q to go back to option select:
Servo 0 cmd: 520
Servo 0 cmd: 510
Servo 0 cmd: 500
Servo 0 cmd: 490
Servo 0 cmd: 480
Servo 0 cmd: 470
Servo 0 cmd: 460
Servo 0 cmd: 450
Servo 0 cmd: 440
Servo 0 cmd: 430
Servo 0 cmd: 420
Servo 0 cmd: 410
Servo 0 cmd: 400
Servo 0 cmd: 306
Servo 0 cmd: 83
Servo 0 cmd: 520
Servo 0 cmd: 520
Servo 0 cmd: 510
Servo 0 cmd: 500
Servo 0 cmd: 490
Servo 0 cmd: 489
Servo 0 cmd: 488
Servo 0 cmd: 487
Servo 0 cmd: 486
Key not in valid key commands, try again
Servo 0 cmd: 476
Servo 0 cmd: 466
Servo 0 cmd: 465
Servo 0 cmd: 464
Servo 0 cmd: 465
Servo 0 cmd: 466
Servo 0 cmd: 476
Servo 0 cmd: 486
Servo 0 cmd: 496
from spotmicro.
mike4192
commented on July 22, 2024
@liwenz you should first verify your VM can communicate with the raspberry pi. For example, try pinging the pi from your VM:
ping 192.168.2.80
and vice versa from the raspberry pi. If not, you need to figure that out first.
Next, try running an example publisher and subscriber in ROS, where one node is running on the raspberry pi and the other on the VM, and see if you can get that to work: http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29
from spotmicro.
mike4192
commented on July 22, 2024
@AlekseyErmolaev your config values look reasonable, or at least they don't have any obvious errors, but they are very different from my set, which is the default set on this repo. However the values are entirely dependent on the positions a servo is installed.
I would double check you followed the calibration directions. Try spot checking a few servos using your calibration table. For example, for the right front lower leg joint (the knee), according to your config table if you command it to a pwm value of 306, will the lower leg link be position truly at 0 degrees?
from spotmicro.
liwenz
commented on July 22, 2024
ping and netccat from pi to vm are ok now.
Remote machine topic listed, but no data transmitted
from spotmicro.
mike4192
commented on July 22, 2024
Which topic?
from spotmicro.
liwenz
commented on July 22, 2024
I forgot, maybe turtle_cmd, I check it again.
publisher, the turtle move.
from spotmicro.
liwenz
commented on July 22, 2024
my test come from: http://wiki.ros.org/ROS/Tutorials/MultipleMachines
ssh hal
roscore
ssh marvin
export ROS_MASTER_URI=http://hal:11311
rosrun rospy_tutorials listener.py
py => rosrun turtlesim turtlesim_node
ssh hal
export ROS_MASTER_URI=http://hal:11311
rosrun rospy_tutorials talker.py
py=> rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
it could control the turtle move in one pc or pi
but remote could not work
rpstopic list work well.
leon@leon:$ rostopic list$
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
leon@leon:
from spotmicro.
liwenz
commented on July 22, 2024
roslaunch servo_move_keyboard keyboard_move.launch
the launch file includes the node:
if="$(arg run_i2c_pwmboard)" name="i2cpwm_board_node" pkg="i2cpwm_board" type="i2cpwm_board" output="screen">
how to set "$(arg run_i2c_pwmboard)" ?
I think I did not start it, so i2cpwm_board did not start.
roslaunch servo_move_keyboard keyboard_move.launch run_i2cpwm_board: =1
I can't change to run i2cpwm_board
leon@leon:~$ rosnode list
/rosout
/servo_move_keyboard_node
Then I edit the launch file , defualt =true
it run:
leon@leon:~$ rosnode list
/i2cpwm_board_node
/rosout
/servo_move_keyboard_node
But I can't get signal on pwm.
How to launch that I could test the pwm signal and run the servo
from spotmicro.
mike4192
commented on July 22, 2024
Not sure what to tell you, running your command works for me, specifically:
roslaunch servo_move_keyboard keyboard_move.launch run_i2c_pwmboard:=true
And the i2c pwmboard node runs.
Note, however, the i2c_pwmboard node will only work correctly if run on a raspberry pi with the pwm board installed and with the i2c, power, and ground pins correctly connected.
Is your pca9685 board powered correctly?. The board requires power both for the board circuitry, and for the servo power. See the following diagram for example, note the top power input from an external 5v power source.
https://steemitimages.com/1280x0/https://res.cloudinary.com/hpiynhbhq/image/upload/v1518024645/eh21urwjil2ply3ay2gz.png
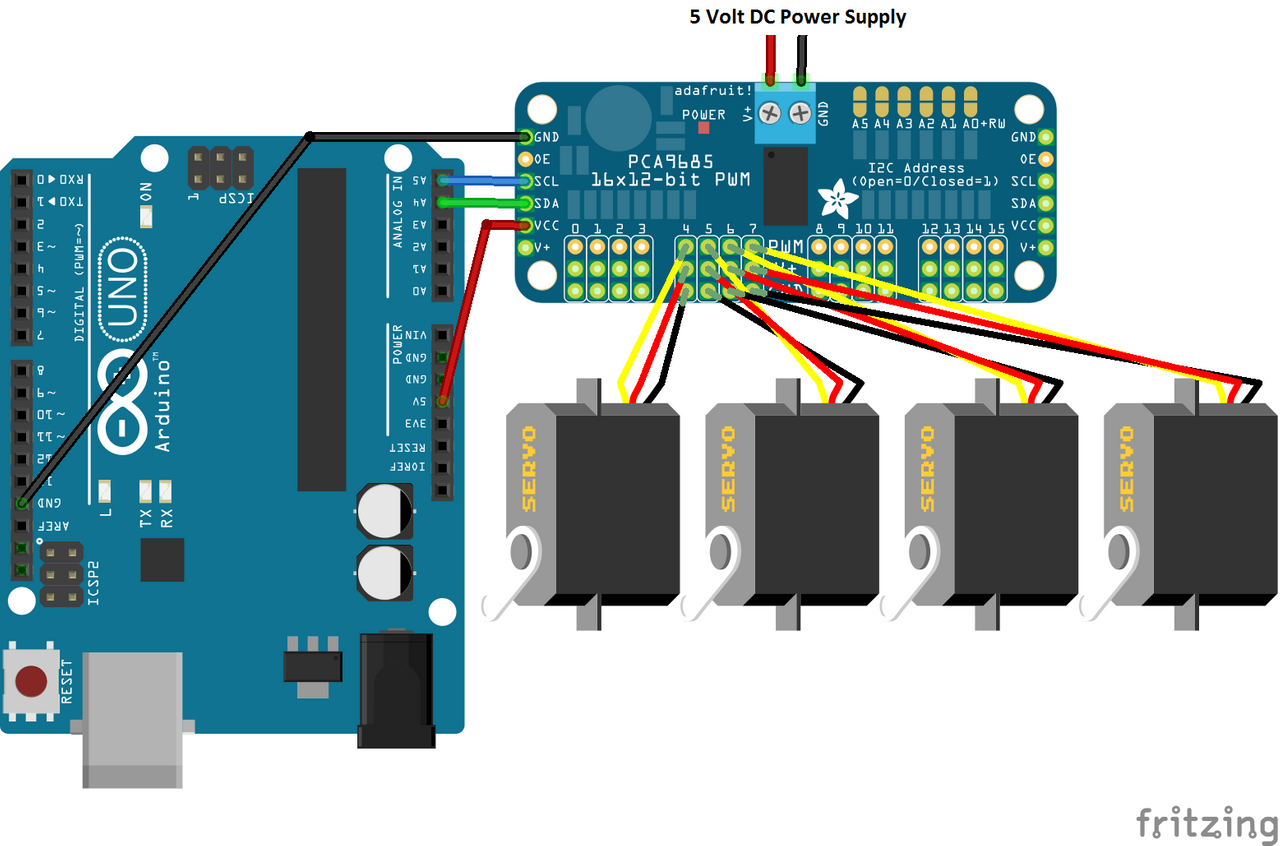{kind=link}
The pi alone probably will not supply enough power to allow the servos to move.
from spotmicro.
liwenz
commented on July 22, 2024
roslaunch servo_move_keyboard keyboard_move.launch run_i2c_pwmboard:=true
it works well. Now I could control servo.
What's next? led display?
or roslaunch spot_micro_motion_cmd motion_cmd.launch run_standalone:=false
from spotmicro.
 kennydedavion
commented on July 22, 2024
kennydedavion
commented on July 22, 2024
Hi, I also have a problem, more.
I am attaching a picture. According to the possibility from the IT specialist at Ros, I had to install a version of melodic.
according to the instruction on the instructable "Rpi4 Lidar melodic Ros".
I can't run anything right now.
i2cpwm_board display reports error:
[FATAL] [1622811777.479435609]: Failed to open I2C bus (null)
spot_micro_motion_command reports an error:
RLException: [spot_micro_motion_cmdConfig-version.cmakerostopic] is neither a launch file in package [spot_micro_motion_cmd] nor is [spot_micro_motion_cmd] a launch file name
The traceback for the exception was written to the log file.
Although everything is in place, but the different versions without catkin have changed, and no one is able to tell me now how to run it?
ps: all the repair options I found and tried, either didn't help or decided the system so that I had to format the storage and reinstall everything.
Thanks for your instructions. There is no arduino in your spot? do you control the rpi servo-shield?
All the problems that, Arduino UNO, Rpi3b and Raspbian with ROS Melodic, contain with this mode, and there is no person who knows all three of these topics, so there is no help for me.
I'm trying to find a solution to combine Ros in such a way that it reads and writes everything to UNO just like the Arduino IDE and its SerialMonitor.
Any ideas to help?
Jacob

from spotmicro.
liwenz
commented on July 22, 2024
where could I find the geometry data, as leg lenth, the arm coordinate,angle.
from spotmicro.
Related Issues (20)
- IMU
- Raspberry Pi images preloaded with Ubuntu 16.04 and a ROS Kinetic installation failed HOT 3
- Increase Pitch/Roll/Yaw Angle command Speed on Joystick HOT 1
- catkinmake HOT 1
- Cannot find module ros-i2cpwmboard HOT 2
- Problem with catkin build on Ubuntu 16.04 and Ros Kinetic HOT 2
- error cannot launch node of type [i2cpwm...], error cannot launch node type of [spot_micro_motion...] HOT 3
- Control body angle while on walking mode
- CMake Error HOT 1
- problem with i2cpwm_boardConfig.cmake HOT 1
- catkin build error: redefinition of 'struct i2c_msg' HOT 1
- Calibration: Servo doesn't react to commands HOT 1
- ESP32 version :) HOT 2
- The servo configuration does not work, the movements do not coincide in reality
- how to additional ROS packages having windows 10 HOT 3
- the package is not being installed libi2c-dev i2c-tools python3-smbus python3-rpi.gpio
- Electronics with rplidar a1
- All robot parts in coordinates 0, 0 and without textures
- i2c_smbus_read_byte_data’ was not declared in this scope; did you mean ‘i2c_smbus_ioctl_data HOT 2
- rviz: No transform from [...] to [...]
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from spotmicro.