
RaspberryPi Hat that integrates power delivery, servos, a display and a communication link
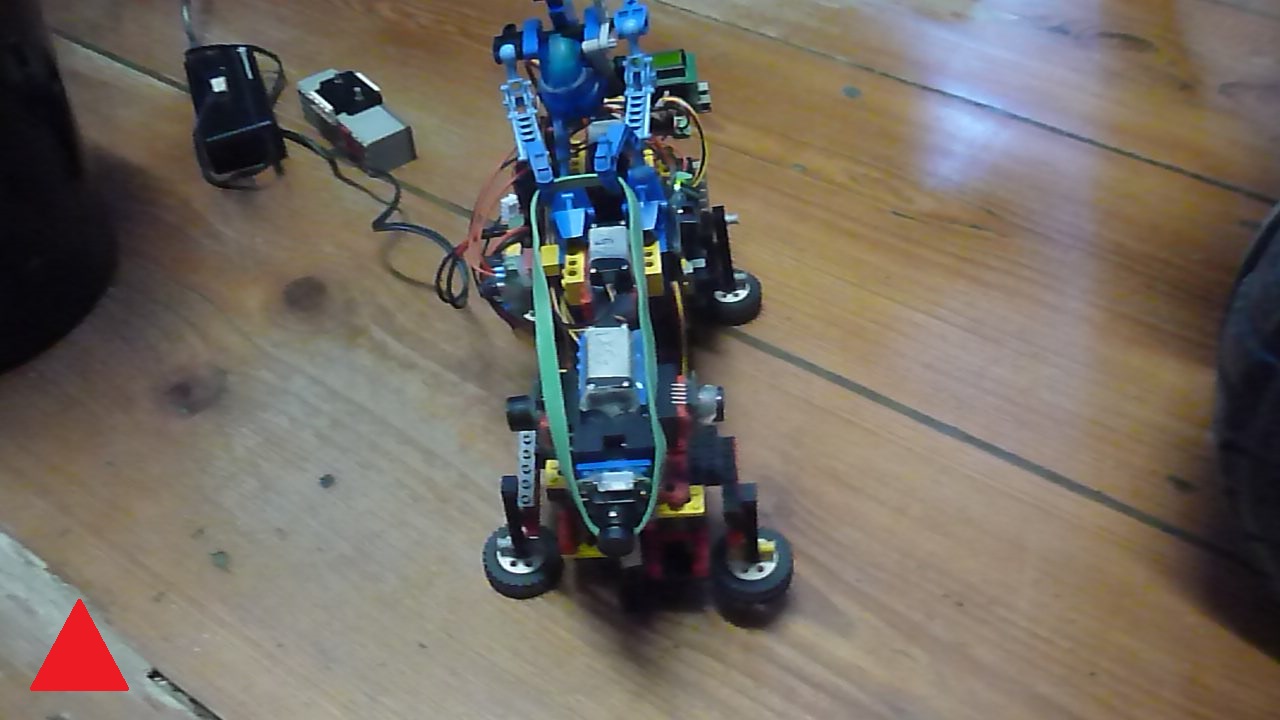
 Eight Servomotors Demo (click on image to see video on youtube)
Eight Servomotors Demo (click on image to see video on youtube)

Repository
GitHub Agile Board

Name: Orso Eric
Type: User
Bio: Helios. Has. Spoken.
Blog: https://fatherofmachines.blogspot.com/p/home-page.html
RaspberryPi Hat that integrates power delivery, servos, a display and a communication link
Eight Servomotors Demo (click on image to see video on youtube)
Repository
GitHub Agile Board
10,000 ft views
A c++ module interfaces with the NODE.JS application and allows for high performance C++ native code to run on OrangeBot
Callback based parser for string based commands. Intended for use in microcontrollers.
Test the H-Bridges integrated inside the HotBlack RaspberryPI Arduino Shield that powers Seeker of Ways-B
Seeker Of Ways - B NODE.JS http websocket Webserver. Host webpage to control SoWB on the RPI3B+ and interfaces with the HotBlack Shield V1
Seeker Of Ways B Open Loop Motor Control Firmware. Features Uniparser V4, communication timeout and motor slew rate
Vertical slice of the motor drive electronics for the OrangeBot robot for the PiWars 2020.
AT4809 with four VNH7040. Four Timers Type B are used to generate the 20KHz PWM channels
Add quad channel quadrature encoder decoding to "OrangeBot" robot
This firmware is able to successfully decode four quadrature encoder channels and communicate the count to the Raspberry Pi
Test bench to develop a 16b fixed point PID class for OrangeBot
Multi channel PWM slope controller class
return a custom type/object from C++ to NODE.JS
HW Encoders have been upgraded. Encoder position and speed full stack implementation. NODE->AT4809->NODE->CPP->NODE->WEBSOCKET->JS+HTML
Release of firmware and RPI SW that adds PID parameter configuration from remote web page
Fixed point 16b PID class meant for use in low power microcontrollers.
Hybrid Integral Speed Position PID operational. Some ringing issues left to solve.
High precision controls, save + load of control parameters + 100ms latency video streaming
OrangeBot firmware ported from AT4809 to AT644 running on the HotBlack Shield
Minimal example showing how to use interrupts in the longan nano. The boot button connected to PA8 triggers the blue/green LED
Use the RTC timer to emit a 4Hz SECOND alarm to toggle the RED LED at 2Hz
Test the SPI1 pheriperal and look at the waveforms
Display driver for the Longan-Nano GD32VF103 based on the ST7735S controller. Driver uses SPI0 and DMA acceleration
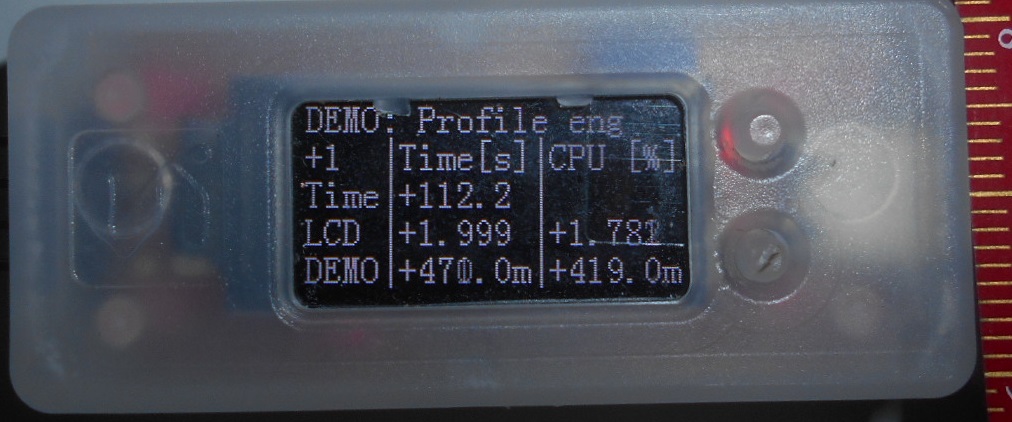
Demo to test the Longan Nano screen driver. Display class interfaces with low level hardware. Screen class provide a sprite based frame buffer meant to reduce CPU use by not redrawing sprites already on screen. Demo uses boot button to cycle between five demos.
Draw an image using CImg and save it as PNG file
Use Python to create a webserver that stream from the raspicam to a browser
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.